راهاندازی PWM در STM32 | قسمت بیست و یکم آموزش STM32 با توابع LL
در قسمت قبلی راهاندازی LCD Nokia به کمک واحد SPI (نمایش انیمیشن روی LCD Nokia) را به صورت کامل یاد گرفتیم و در بخشهای قبلی با تایمرها آشنا شدیم و برخی کاربردهای آنها را دیدیم. یکی دیگر از کاربردهای تایمر، حالت PWM (Pluse width Modulation) یا همان مدولاسیون پهنای پالس است. در این بخش با نحوه استفاده از این حالت آشنا خواهیم شد.
-

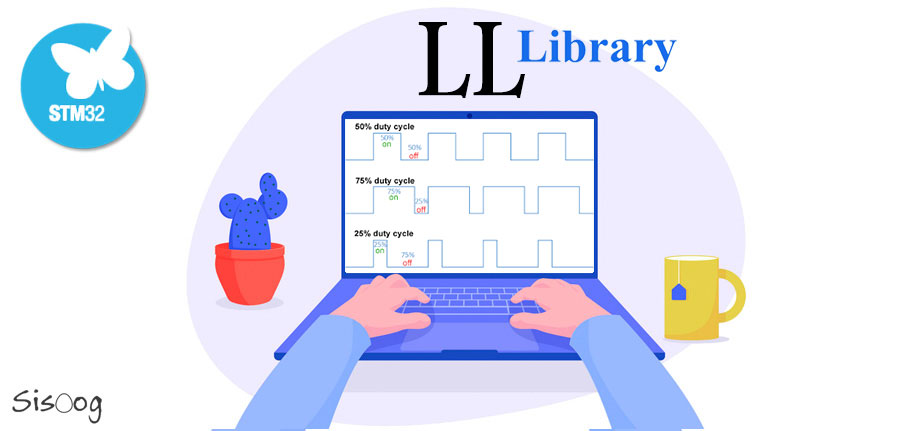
- مدولاسیون پهنای پالس.
همانطور که در شکل بالا مشخص است، به وسیله PWM میتوانیم از طریق کنترل Duty Cycle یا زمان on بودن و off بودن موج مربعی، ولتاژ متوسطی که اعمال میکنیم را کنترل کنیم. این عمل کاربردهای بسیار زیادی دارد که از جمله آنها میتوان به کنترل شدت روشنایی، کنترل سرعت موتور و .. اشاره کرد.
در ادامه این آموزش با چگونگی کنترل شدت روشنایی یک LED آشنا میشویم.
ایجاد پروژه
مراحل ساخت پروژه را مانند قبل طی میکنیم، کلاک و دیباگ را تنظیم میکنیم. سپس تایمر1 را به صورت زیر در حالت PWM تنظیم میکنیم:
-

- تنظیم تایمر1 در حالت PWM.
بعد از تنظیم تایمر، بقیه بخشها را نیز مانند گذشته تنظیم میکنیم و وارد محیط Keil میشویم.
نوشتن کد
برای استفاده از PWM قبل از هر چیز ، باید شمارنده و خروجی تایمر1 را فعال کنیم، همچنین متغیرهای مورد نیاز را تعریف کنیم؛
1 2 3 4 5 | LL_TIM_EnableCounter(TIM1); //Enable Timer1's counter LL_TIM_CC_EnableChannel(TIM1, LL_TIM_CHANNEL_CH1); //Enable channel1 of Timer1(PWM) LL_TIM_EnableAllOutputs(TIM1); //Enable Timer1's outputs uint32_t Max = LL_TIM_GetAutoReload(TIM1) + 1; //Get the value of Timer1's ARR uint8_t count = 10; //Number of steps |
درون متغیر Max مقدار رجیستر ARR به اضافه یک را قرار دادهایم. اکنون به وسیله این مقدار، میتوانیم تعیین کنیم که به چه Duty Cycle ای نیاز داریم. به وسیله کد زیر، شدت نور LED به آرامی زیاد میشود تا به بیشترین مقدار خود برسد و این عمل تکرار میشود. همانطور که توضیح داده شد این عمل از طریق مدولاسیون پهنای پالس و کنترل میانگین ولتاژ اعمال شده به LED انجام میشود؛
1 2 3 4 5 | for (int i = 0; i < count; i++) { LL_TIM_OC_SetCompareCH1(TIM1, i * (Max / count)); //Set Duty cycle LL_mDelay(120); } |
در بخش بعدی در مورد نحوه ایجاد شکل موجهای مختلف توسط تایمر در حالت PWM صحبت خواهیم کرد.

پالت | بازار خرید و فروش قطعات الکترونیک
قطعات اضافه و بدون استفاده همیشه یکی از سربارههای شرکتها و طراحان حوزه برق و الکترونیک بوده و هست. پالت سامانهای است که بصورت تخصصی اجازه خرید و فروش قطعات مازاد الکترونیک را فراهم میکند. فروش در پالت
آیسی | موتور جستجوی قطعات الکترونیک
سامانه آی سی سیسوگ (Isee) قابلیتی جدید و کاربردی از سیسوگ است. در این سامانه سعی شده است که جستجو، انتخاب و خرید مناسب تر قطعات برای کاربران تسهیل شود. وقتی شما در این سامانه، قطعه الکترونیکی را جستجو میکنید؛ آی سی به سرعت نتایج جستجوی شما در اکثر فروشگاههای آنلاین در حوزه قطعات الکترونیک را نمایش میدهد. جستجو در آیسی
سیسوگ شاپ | فروشگاه محصولات Quectel
فروشگاه سیسوگ مجموعه ای متمرکز بر تکنولوژی های مبتنی بر IOT و ماژول های M2M نظیر GSM، GPS، LTE، NB-IOT، WiFi، BT و ... جایی که با تعامل فنی و سازنده، بهترین راهکارها انتخاب می شوند. برو به فروشگاه سیسوگ






نویسنده شو !
سیسوگ با افتخار فضایی برای اشتراک گذاری دانش شماست. برای ما مقاله بنویسید.