رابط سریال ( UART ) در STM8 | قسمت بیست و دوم آموزش STM8
سیسوگ در قسمت بیستم و یکم آموزش میکروکنترلر STM8 ارتباطات این میکروکنترلر با دنیای بیرون را به صورت اجمالی مورد بررسی قرار داد و قصد دارد در هر قسمت به یکی از رابط های ارتباطی بپردازد. در این از قسمت آموزش میکروکنترلر STM8 رابط سریال ( UART ) را بررسی میکند. با سیسوگ همراه باشید.
رابط سریال ( UART )
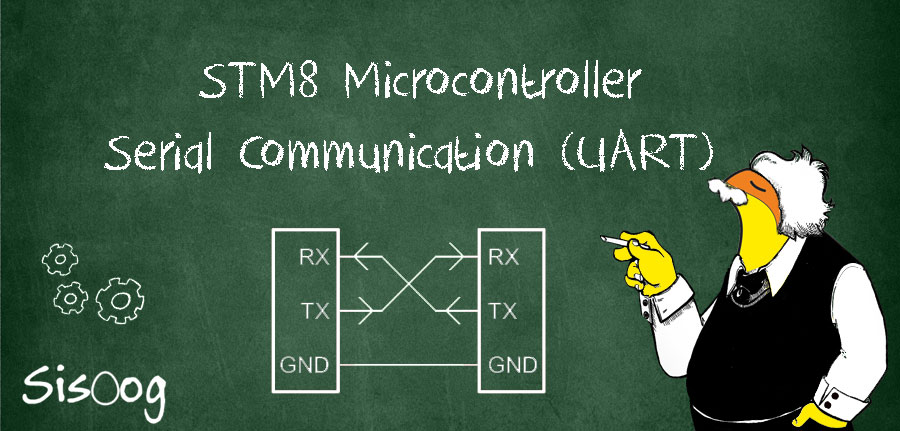
شاید ارتباط سریال یکی از روش های ارتباطی کلاسیک برای ارتباط بین کامپیوتر یا سایر دستگاه ها با میکروکنترلر باشد. تنها با استفاده از دو سیم، میتوانیم یک ارتباط نقطه به نقطه دو طرفه را بدست آوریم. به دلیل سادگی و استفاده گسترده از آن، نقش مهمی در زمینه رابط ارتباطی دارد، به طوری که با مودمهای GSM ، ماژول RF ، دستگاههای بلوتوث مانند RN-52 ، دستگاههای Wi-Fi مانند ESP8266 و غیره استفاده میشود. همچنین استفاده گستردهای در صنایع دارد. ارتباطات دیگر مانند RS-485، LIN و غیره به آن متکی هستند.
 در STM8 | قسمت بیست و دوم آموزش STM8 1")
اکثر STM8 ها حداقل دارای یک ماژول UART هستند و برخی از آنها بیش از یک ماژول UART دارند. UART های مختلف دارای ویژگی های مختلفی هستند که در جدول زیر نشان داده شده است:
 در STM8 | قسمت بیست و دوم آموزش STM8 2")
برای کسب اطلاعات بیشتر در مورد UART، به لینک آن مراجعه نمایید.
UART های میکروکنترلر STM8 دارای ویژگیهای بسیاری است که در این مقاله امکان توضیح تمام ویژگیها وجود ندارد. در اینجا تنها ارتباط سریالی را بررسی میکنیم. LIN و IRDA را در مقالات بعدی پوشش میدهیم.
اتصالات سخت افزاری:
 در STM8 | قسمت بیست و دوم آموزش STM8 3")
نمونه کد UART :
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 | #include "STM8S.h" #include "STM8S_lcd.h" unsigned int overflow_count = 0; unsigned long pulse_ticks = 0; unsigned long start_time = 0; unsigned long end_time = 0; void clock_setup(void); void GPIO_setup(void); void UART1_setup(void); void main(void) { unsigned char i = 0; char ch = 0; clock_setup(); GPIO_setup(); UART1_setup(); LCD_init(); LCD_clear_home(); LCD_goto(0, 0); LCD_putstr("TX:"); LCD_goto(0, 1); LCD_putstr("RX:"); while(TRUE) { if(UART1_GetFlagStatus(UART1_FLAG_RXNE) == TRUE) { ch = UART1_ReceiveData8(); LCD_goto(7, 1); LCD_putchar(ch); UART1_ClearFlag(UART1_FLAG_RXNE); UART1_SendData8(i + 0x30); } if(UART1_GetFlagStatus(UART1_FLAG_TXE) == FALSE) { LCD_goto(7, 0); LCD_putchar(i + 0x30); i++; } }; } void clock_setup(void) { CLK_DeInit(); CLK_HSECmd(DISABLE); CLK_LSICmd(DISABLE); CLK_HSICmd(ENABLE); while(CLK_GetFlagStatus(CLK_FLAG_HSIRDY) == FALSE); CLK_ClockSwitchCmd(ENABLE); CLK_HSIPrescalerConfig(CLK_PRESCALER_HSIDIV8); CLK_SYSCLKConfig(CLK_PRESCALER_CPUDIV1); CLK_ClockSwitchConfig(CLK_SWITCHMODE_AUTO, CLK_SOURCE_HSI, DISABLE, CLK_CURRENTCLOCKSTATE_ENABLE); CLK_PeripheralClockConfig(CLK_PERIPHERAL_I2C, DISABLE); CLK_PeripheralClockConfig(CLK_PERIPHERAL_SPI, DISABLE); CLK_PeripheralClockConfig(CLK_PERIPHERAL_ADC, DISABLE); CLK_PeripheralClockConfig(CLK_PERIPHERAL_AWU, DISABLE); CLK_PeripheralClockConfig(CLK_PERIPHERAL_UART1, ENABLE); CLK_PeripheralClockConfig(CLK_PERIPHERAL_TIMER1, DISABLE); CLK_PeripheralClockConfig(CLK_PERIPHERAL_TIMER2, DISABLE); CLK_PeripheralClockConfig(CLK_PERIPHERAL_TIMER4, DISABLE); } void GPIO_setup(void) { GPIO_DeInit(GPIOD); GPIO_Init(GPIOD, GPIO_PIN_5, GPIO_MODE_OUT_PP_HIGH_FAST); GPIO_Init(GPIOD, GPIO_PIN_6, GPIO_MODE_IN_PU_NO_IT); } void UART1_setup(void) { UART1_DeInit(); UART1_Init(9600, UART1_WORDLENGTH_8D, UART1_STOPBITS_1, UART1_PARITY_NO, UART1_SYNCMODE_CLOCK_DISABLE, UART1_MODE_TXRX_ENABLE); UART1_Cmd(ENABLE); } |
توضیحات:
کلاک داخلی و کلاک CPU روی 2 مگاهرتز تنظیم می شوند.
1 2 3 4 5 | CLK_HSIPrescalerConfig(CLK_PRESCALER_HSIDIV8); CLK_SYSCLKConfig(CLK_PRESCALER_CPUDIV1); …. …. CLK_PeripheralClockConfig(CLK_PERIPHERAL_UART1, ENABLE); |
پین های TX-RX به ترتیب خروجی و ورودی تعریف میشوند:
1 2 3 4 | GPIO_DeInit(GPIOD); GPIO_Init(GPIOD, GPIO_PIN_5, GPIO_MODE_OUT_PP_HIGH_FAST); GPIO_Init(GPIOD, GPIO_PIN_6, GPIO_MODE_IN_PU_NO_IT); |
راه اندازی UART خیلی ساده است. به راحتی میتوانید نرخ باند و بیت ونوع ارتباط (سنکرون و آسنکرون) و … را تنظیم کنید.
1 2 3 4 5 6 7 8 9 10 11 12 13 | void UART1_setup(void) { UART1_DeInit(); UART1_Init(9600, UART1_WORDLENGTH_8D, UART1_STOPBITS_1, UART1_PARITY_NO, UART1_SYNCMODE_CLOCK_DISABLE, UART1_MODE_TXRX_ENABLE); UART1_Cmd(ENABLE); } |
در کد اصلی، هر دو پرچم تکمیل ارسال و تکمیل دریافت را بررسی میکنیم. با استفاده از این پرچمها متوجه میشویم داده جدیدی وارد شده است، همچنین امکان ارسال داده جدید را متوجه میشویم.
در قسمت اول، دریافت دادههای جدید بررسی میشود. به همین دلیل وضعیت “IF” بررسی میشود که آیا بافر RX خالی است یا نه. اگر خالی نیست،باید اطلاعات جدید دریافت شود. دادههای جدید (در اینجا کاراکترها) دریافت شده و بر روی LCD نمایش داده میشوند. سپس با استفاده از بافر RX پرچم خالی را روشن میکنیم تا امکان پذیرش دادههای جدید را فعال کنیم. سپس برخی از دادهها را از طریق UART به کامپیوتر میزبان ارسال میکنیم.
1 2 3 4 5 6 7 8 | if(UART1_GetFlagStatus(UART1_FLAG_RXNE) == TRUE) { ch = UART1_ReceiveData8(); LCD_goto(7, 1); LCD_putchar(ch); UART1_ClearFlag(UART1_FLAG_RXNE); UART1_SendData8(i + 0x30); } |
در قسمت دوم کد UART ، بررسی می کنیم آیا آخرین اطلاعات از STM8 به کامپیوتر ارسال شده است. اطلاعات ارسال شده در LCD نمایش داده میشود.
1 2 3 4 5 6 | if(UART1_GetFlagStatus(UART1_FLAG_TXE) == FALSE) { LCD_goto(7, 0); LCD_putchar(i + 0x30); i++; } |
لطفا توجه داشته باشید هر دو پرچم بسیار مهم هستند.
 در STM8 | قسمت بیست و دوم آموزش STM8 4")
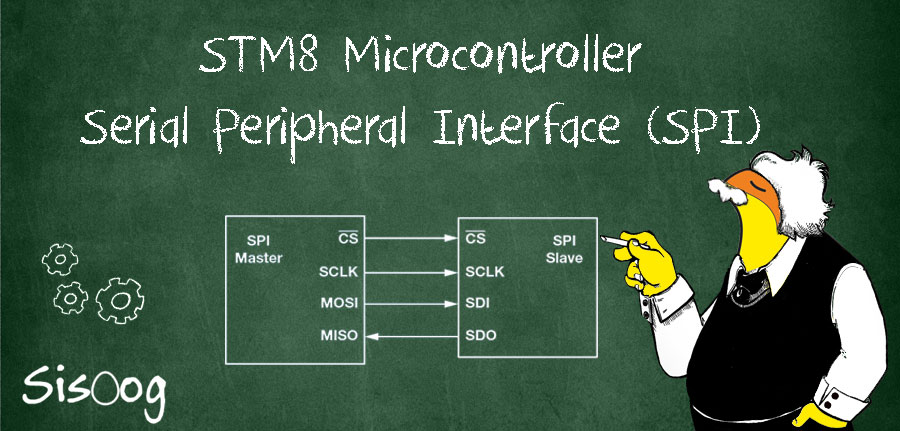
در این قسمت به رابط سریال ( UART ) پرداختیم. در قسمت بیست و سوم آموزش میکروکنترلر STM8 به رابط کاربری سریال (SPI) میپردازیم. با سیسوگ همراه باشید.
لینکهای دانلود
مطالب مرتبط
- قسمت اول − میکروکنترلر STM8 چیست و از کجا آمده است؟
- قسمت دوم − معرفی بردهای Discovery میکروکنترلر STM8
- قسمت سوم − کامپایلر و پروگرامر
- قسمت چهارم − STM8CubeMX
- قسمت پنجم − آماده سازی ابزارهای نرمافزاری برای STM8
- قسمت ششم − چگونه برنامه خود را روی STM8 آپلود کنیم؟
- قسمت هفتم− LED چشمکزن
- قسمت هشتم − کلاک سیستم (CLK)
- قسمت نهم − وقفه خارجی (EXTI)
- قسمت دهم − Beeper
- قسمت یازدهم − LCD کاراکتری
- قسمت دوازدهم − مبدل آنالوگ به دیجیتال (ADC)
- قسمت سیزدهم − تایمر نگهبان آنالوگ (AWD)
- قسمت چهادهم − تایمر نگهبان (IWDG)
- قسمت پانزدهم − تایمر نگهبان محدوده ای (WWDG)
- قسمت شانزدهم− اصول اولیه تایمرها
- قسمت هفدهم− تایمر 2
- قسمت هجدهم −تایمر 4
- قسمت نوزدهم −PWM
- قسمت بیستم − PWM تایمر 1
- قسمت بیست و یکم − بررسی اجمالی ارتباطات
- قسمت بیست و سوم − رابط کاربری سریال (SPI)
- قسمت بیست و چهارم − رابط I2C
- دوره رایگان آموزش میکروکنترلر STM8 – سیسوگ





پالت | بازار خرید و فروش قطعات الکترونیک
قطعات اضافه و بدون استفاده همیشه یکی از سربارههای شرکتها و طراحان حوزه برق و الکترونیک بوده و هست. پالت سامانهای است که بصورت تخصصی اجازه خرید و فروش قطعات مازاد الکترونیک را فراهم میکند. فروش در پالت
آیسی | موتور جستجوی قطعات الکترونیک
سامانه آی سی سیسوگ (Isee) قابلیتی جدید و کاربردی از سیسوگ است. در این سامانه سعی شده است که جستجو، انتخاب و خرید مناسب تر قطعات برای کاربران تسهیل شود. جستجو در آیسی
سیسوگشاپ | فروشگاه محصولات Quectel
فروشگاه سیسوگ مجموعه ای متمرکز بر تکنولوژی های مبتنی بر IOT و ماژول های M2M نظیر GSM، GPS، LTE، NB-IOT، WiFi، BT و ... جایی که با تعامل فنی و سازنده، بهترین راهکارها انتخاب می شوند. برو به فروشگاه سیسوگ
سیسوگ فروم | محلی برای پاسخ پرسشهای شما
دغدغه همیشگی فعالان تخصصی هر حوزه وجود بستری برای گفتگو و پرسش و پاسخ است. سیسوگ فروم یک انجمن آنلاین است که بصورت تخصصی امکان بحث، گفتگو و پرسش و پاسخ در حوزه الکترونیک را فراهم میکند. پرسش در سیسوگ فرم
سیکار | اولین مرجع متن باز ECU در ایران
بررسی و ارائه اطلاعات مربوط به ECU (واحد کنترل الکترونیکی) و نرمافزارهای متن باز مرتبط با آن برو به سیکار







نویسنده شو !
سیسوگ با افتخار فضایی برای اشتراک گذاری دانش شماست. برای ما مقاله بنویسید.