مسابقه اول : درک سخت افزار
مدت زیادی از مسابقه اول (لینک مسابقه در کانال تلگرام) سیسوگ در تلگرام میگذره و فکر کردم بهتره باز با یک چالش دیگه در خدمتتون باشیم
این بار خبری از اتفاقات خارق العاده و بلک باکس نیست بلکه با یک سوال سادهتر چالش را پیش خواهیم برد، و اما چالش :
1 2 3 4 5 6 7 8 9 10 11 12 | int main(void) { uint8_t i=0; while(1) { if(i++>4) { i=0; PORTx ^=(1<<bit); } } } |
کسانی که بتوانند توضیح دهند کدام معماری با سرعت بیشتری برنامه را اجرا میکند به قید قرعه یک عدد لاجیک آنالایزر ۸ کاناله ۲۴ مگاسمپل هدیه دریافت خواهد کرد.
پاسخ را زیر همین مطلب کامنت کنید.(عجله کنید که تا پایان روز شنبه 5 بهمن ماه 98 فرصت هست?).
+ احتمالا پاسخ های صحیح زیاد خواهند بود:)! پس قرعه کشی بین کامل ترین و جامع ترین پاسخ ها انجام خواهد شد.
و اما جواب چالش اول سیسوگ
و اما جواب ! واقعا کدام میکروکنترلر با کلاک ۱ مگاهرتز توانایی اجرای سریعتر برنامه فوق را دارد ! دوستانی اشاره کرده بودند که برنامه سی ملاک خوبی برای مقایسه نیست بله کاملا درسته اما اگر دقت کنید این برنامه صرفا یک فلوچارت از کاری است که باید انجام شود که بخاطر آشنایی بیشتر دوستان با زبان سی ، با این سینتکس نوشته شده است.
برای پیدا کردن جواب سوال لازم است که گزینه های موجود را یکی یکی حذف کنیم تا به جواب چالش برسیم. تعدادی از دوستان اشاره کرده بودند که ۸۰۵۱ جواب است. اما واقعا ۸۰۵۱ سرعت بیشتری برای اجرای این چنین برنامه هایی دارد ؟

همانطور که در تصویر فوق می بینید هسته ۸۰۵۱ برای اجرای هر دستور اسمبلی نیاز به ۱۲ کلاک ساعت دارد! یعنی اگر کلاک ورودی ۱ مگاهرتز باشد هسته ۸۰۵۱ قادر است ۸۳ هزار دستور در ثانیه اجرا کند! که خوب عدد بسیار کمی است و قطعا نمی تواند جواب مسابقه باشد.
میکروکنترلر PIC چطور ؟
تعدادی دیگری از دوستان میکروکنترلر PIC را برنده مسابقه اعلام کردند ، اما وضعیت این میکروکنترلر چطور است ؟ میتواند برنده مسابقه باشد ؟ همانطور که تعداد زیادی از دوستان اشاره کردند هسته PIC برای اجرای هر دستور اسمبلی نیاز دارد که کلاک ورودی را بر ۴ تقسیم کند. یعنی به ازاء کلاک ورودی ۱ مگاهرتزی قادر است ۲۵۰ کیلو دستور را اجرا کند!

همانطور که در تصویر بالا می بینید به این نکته به خوبی اشاره شده است(لینک). خوب پس این میکروکنترلر هم نمی تواند جواب باشد.
ARM یا AVR کدام یک ؟
تنها دو گزینه می ماند میکروکنترلر AVR و ARM – اما کدام یک سریعتر است ؟ هر دوی این میکروکنترلر ها کلاک ورودی مستقیما به هسته وارد می شد و برای اجرای هر دستور نیاز نیست که کلاک شکسته شود. و اغلب دستوات اسمبلی را هر دوی این میکروکنترلر ها در یک سیکل ماشین اجرا می کنند. تازه از این که بگذریم میکروکنترلر ARM چیزهایی دارد که AVR ندارد – مثل این که ۳۲ بیتی است و دارای PipeLine است (اگر نمیدانید پایپ لاین چیست مقاله با مفهوم Pipeline بهتر آشنا شوید و میکروکنترلر STM8 از کجا اومد و چه قابلیت هایی داره را مطالعه کنید).
آیا ۳۲ بیتی بودن مزیت است ؟
خوب البته معلوم است که ۳۲ بیتی بودن خوب است اما اگر به برنامه نگاه کنید هیچ عملیاتی نداریم که نیاز به محاسبات و یا ذخیره سازی ۳۲ بیتی داشته باشد. پس در این مثال ۳۲ بیتی بودن برای میکروکنترلر ARM مزیت حساب نمی شود.
پایپ لاین چطور ؟
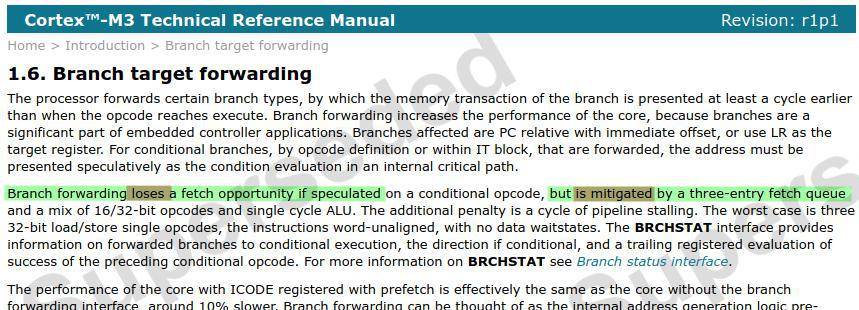
خوب اگر مقالات مربوط به پایپ لاین را مطالعه کرده باشید حتما میدانید که پایپ لاین کمک میکند تا پردازنده برنامه را سریعتر اجرا کند ! و همانطور که میدانید میکروکنترلر ARM با هسته Cortex-M3 دارای یک پایپ لاین ۳ مرحلهای است.

به لطف وجود همین پایپ لاین است که میکروکنترلر ARM قادر است بیشتر دستورات را در یک سیکل ماشین اجرا کند و دقیقا پاشنه آشیل جواب سوال همنجاست. پایپلاین حتی کمک میکند پرفومنس پردازنده از ۱ بیشتر باشد و برای هسته M3 معادل ۱٫۲۵ باشد.
اما چطور ؟ این موضوعی است که انتظار داشتم دوستان به آن اشاره کنند اما متاسفانه در هیچ یک از کامنت ها به آن اشاره نشد اما بین دوستانی که کامل ترین توضیح رو دادن قرعه کشی خواهیم کرد.
قضیه دقیقا به وجود if در برنامه بر میگردد. اجرای دستورات شرطی باعث میشود که پایپ لاین خالی بشه اگر به تصویر پایپ لاین که بالا هم گذاشتیم دقت کنید branch ها رو با خط تیره به اول پایپ لاین وصل کرده و حداقل دو سیکل ماشین برای پرشدن مجدد لازم است و همین خالی و پر شدن پایپ لاین باعث میشه که میکروکنترلر AVR جلو بیفته.

عکس بالا هم به خوبی عملکرد هر دو میکروکنترلر رو نشان میدهد و به خوبی مشخص است که میکروکنترلر AVR عملکرد بهتری دارد و باید AVR را اعلام کنیم.

و اما برنده – بین تمام کامنت های دریافتی ۴ کامنت صحیح با توضیحات قابل قبول وجود داشت – یکی کامنت حسین و دوم کامنت محمد هشیار بود و سوم کامنت محمد یوسفی و کامنت چهارم هم مربوط به رضا بیات است. با قرعه کشی که انجام دادیم برنده آقای حسین شدن با کامنت:
با سلام .
سپاس بابت کاربسيار خوبي که انجام داديد . جايزه ش خيلي بدرد بخوره!!! [نيشخند][چشمک] ولي جداي از شوخي اينکار باعث ميشه افراد ديتاشيت رو مطالعه کنن و باعث افزايش سطح علمي ميشه که خودش جاي تقدير داره .
و اما جواب:
قبل از اينکه جواب رو بگم بايد بگم در مورد آرم چون PLL داره نميشه گفت که فرکانس هسته چند ميشه در مورد pic و 8051 مقسم فرکانس داخلي دارن. بنابر اين باتوجه به اينکه صورت مسئله نبايد مبهم باشه حدس منطقي اينه که منظور فرکانس هسته 1 مگاهرتز هست . اين از اين .
@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@
@@@@@@ و اما جواب اينه که AVR از همه سريعتر است . @@@@@@@@@
@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@@
دليل برتري avr اينه :
معماري هسته AVR اين طوره که بسياري از دستورات که مربوط به فايل رجيسترها هستن فقط در يک سيکل ساعت واکشي و اجرا ميشن .( ديگه از اين سريعتر نميشه که !!!! ) و مورد ديگه اينه که AVR تعداد زيادي فايل رجيستر داره !!! دقيقا 32 تا و براي هرکاري که شما بخواهيد روي اين فايل رجيسترها انجام بده يک دستور اسمبلي داره ه همين علت تعداد دستورات AVR نسبت به بقيه ميکروها زياد تره و حدود 130 تا دستور ميشه و همين باعث ميشه در تعداد زيادي از کارها فقط يک دستوراسمبلي ( يک پالس کلاک ) براي انجامش احتياج باشه( و کمتر نياز باشه از رم استفاده بشه که 2 کلاک مصرف ميکنه ) . با توجه به اينکه فرکانس کلاک هسته AVR همون فرکانس کريستال هست ، به وضوح مشخص هست به چه سرعتي دستورات رو انجام ميده !!
و اما در مورد 8051( احتمال زياد مدلهاي قديمي AT89C51-55 مدنظر بوده چون بيشتر ملت اينا رو ميشناسن )
اينطور نيست که بشه مستقيم با يک دستور مثلا r1 , r5 راکپي کرد .و بايد حتما از رجيستر A يا اکومولاتور استفاده کرد . همين يعني کند تر شدن اجراي دستورات .
در مورد pic هم داستان اکومولاتور صادق هست .
در مورد Arm چون من با stm32 کار کردم ، اون رو ميگم :
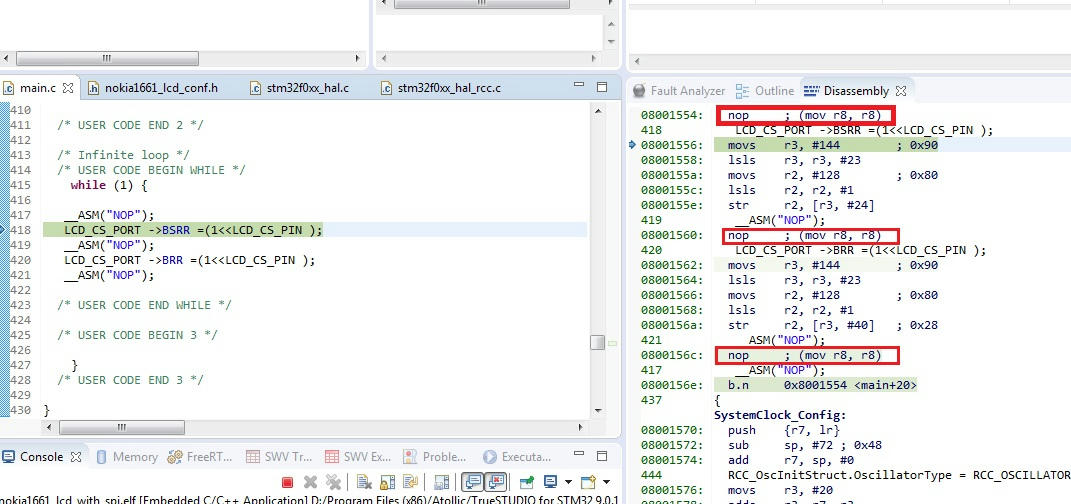
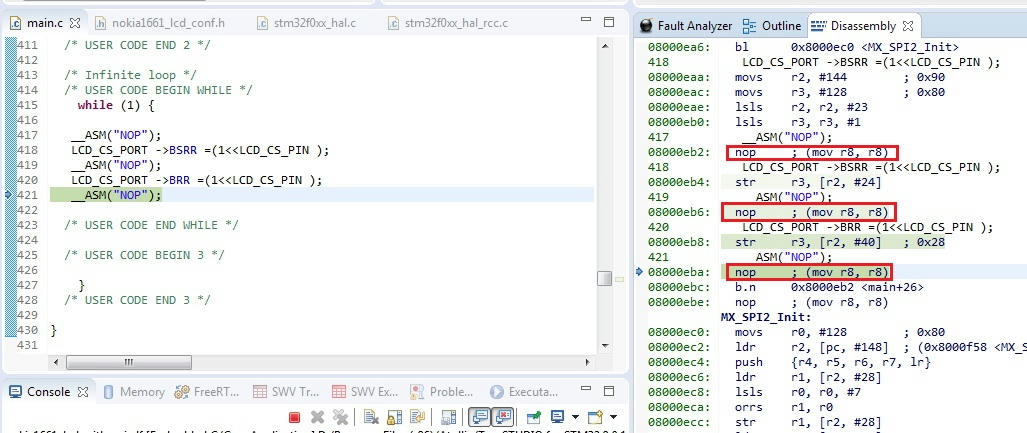
دستورات اسمبلي stm32 پارامترهاي بيشتري نسبت متغير به ميکروهاي 8 بيتي داره و روي متغير هاي 32 بيتي بهتر از 8 بيتي عمل ميکنه ( اين مورد رو خودم با بررسي کد اسمبلي برنامه حين ديباگ به چشم ديدم )و تعداد زيادتري پالس کلاک براي اجرا احتتياج داره و معمولا به زور پايپ لاين اجراي زمان اجراي هر دستور را به يک کلاک ميرسونن .!! اما باز هم در حين ديباگ يک برنامه ديدم که براي 1 کردن يک بيت پورت 4 دستور و براي 0 کردنش 3 دستور استفاده شده بود …تازه اين عملکرد با بهينه سازي روي سرعت اتفاق افتاده بود بدون بهينه سازي 6 و 5 دستور طول ميکشيد .!!!
البته کمپايلرها هم در سرعت مور هستن ولي اگر بخواهيم الگوريتم بالا را اسمبلي بنويسيم
AVR سريعتره .


پالت | بازار خرید و فروش قطعات الکترونیک
قطعات اضافه و بدون استفاده همیشه یکی از سربارههای شرکتها و طراحان حوزه برق و الکترونیک بوده و هست. پالت سامانهای است که بصورت تخصصی اجازه خرید و فروش قطعات مازاد الکترونیک را فراهم میکند. فروش در پالت
آیسی | موتور جستجوی قطعات الکترونیک
سامانه آی سی سیسوگ (Isee) قابلیتی جدید و کاربردی از سیسوگ است. در این سامانه سعی شده است که جستجو، انتخاب و خرید مناسب تر قطعات برای کاربران تسهیل شود. جستجو در آیسی
سیسوگشاپ | فروشگاه محصولات Quectel
فروشگاه سیسوگ مجموعه ای متمرکز بر تکنولوژی های مبتنی بر IOT و ماژول های M2M نظیر GSM، GPS، LTE، NB-IOT، WiFi، BT و ... جایی که با تعامل فنی و سازنده، بهترین راهکارها انتخاب می شوند. برو به فروشگاه سیسوگ
سیسوگ فروم | محلی برای پاسخ پرسشهای شما
دغدغه همیشگی فعالان تخصصی هر حوزه وجود بستری برای گفتگو و پرسش و پاسخ است. سیسوگ فروم یک انجمن آنلاین است که بصورت تخصصی امکان بحث، گفتگو و پرسش و پاسخ در حوزه الکترونیک را فراهم میکند. پرسش در سیسوگ فرم
سیکار | اولین مرجع متن باز ECU در ایران
بررسی و ارائه اطلاعات مربوط به ECU (واحد کنترل الکترونیکی) و نرمافزارهای متن باز مرتبط با آن برو به سیکار







{kind=link}
{kind=link}
نویسنده شو !
سیسوگ با افتخار فضایی برای اشتراک گذاری دانش شماست. برای ما مقاله بنویسید.