در قسمت قبلی به بررسی علت استفاده از PID در یک سناریو عملی در بستر گلخانه هوشمند و نحوه کارکرد PID پرداختیم و در این قسمت قصد داریم با الگوریتم و پارامترهای PID آشنا شده و عملکرد انواع کنترلرهای PID را بررسی کنیم.
الگوریتم PID دارای سه پارمتر برای تنظیم (Tuning) است. این پارامترها عبارتاند از: پارامتر تناسب Kp، پارامتر انتگرال Ti (Ki) و پارامتر مشتق Td (Kd) که باید آنها بهطور صحیح تنظیم شوند تا PID کارکرد درست داشته باشد. در ادامه مناسبترین راه برای برنامهریزی کنترلر PID به همراه روشهای تنظیمان معرفی کنیم. با تنظیم پارامترهای PID میتوانیم مشخص کنیم با چه دقت و سرعت تصحیح دمایی اعمال شود. هرکدام از پارامترها یک سیگنال جداگانه برای خروجی کنترلر ایجاد میکند. اما بهدست آوردن بهترین ثابتها برای این سه پارامتر در سیستمهای مختلف دشواری متناسب خودش را دارد.
پاسخ پارامترهای PID
قسمت Proportional برپایه نسبتی از خطا در لحظه به خروجی سیستم اعمال و اضافه میشود. اما قسمت Integral یک کنترلر حافظهدار است به معنی آنکه در هرلحظه تحت تأثیر مجموع خطاهای سیستم درگذشته است و همچنین بخش Differential به نرخ تغییرات خطا حساس بوده و رفتار آینده خطای فعلی را در نظر میگیرد و به سیستم اعمال و اضافه میشود. در ادامه ویژگی هرکدام از پارامترهای PID بیانشده است.
- پاسخ تناسبی ( پارامترP):
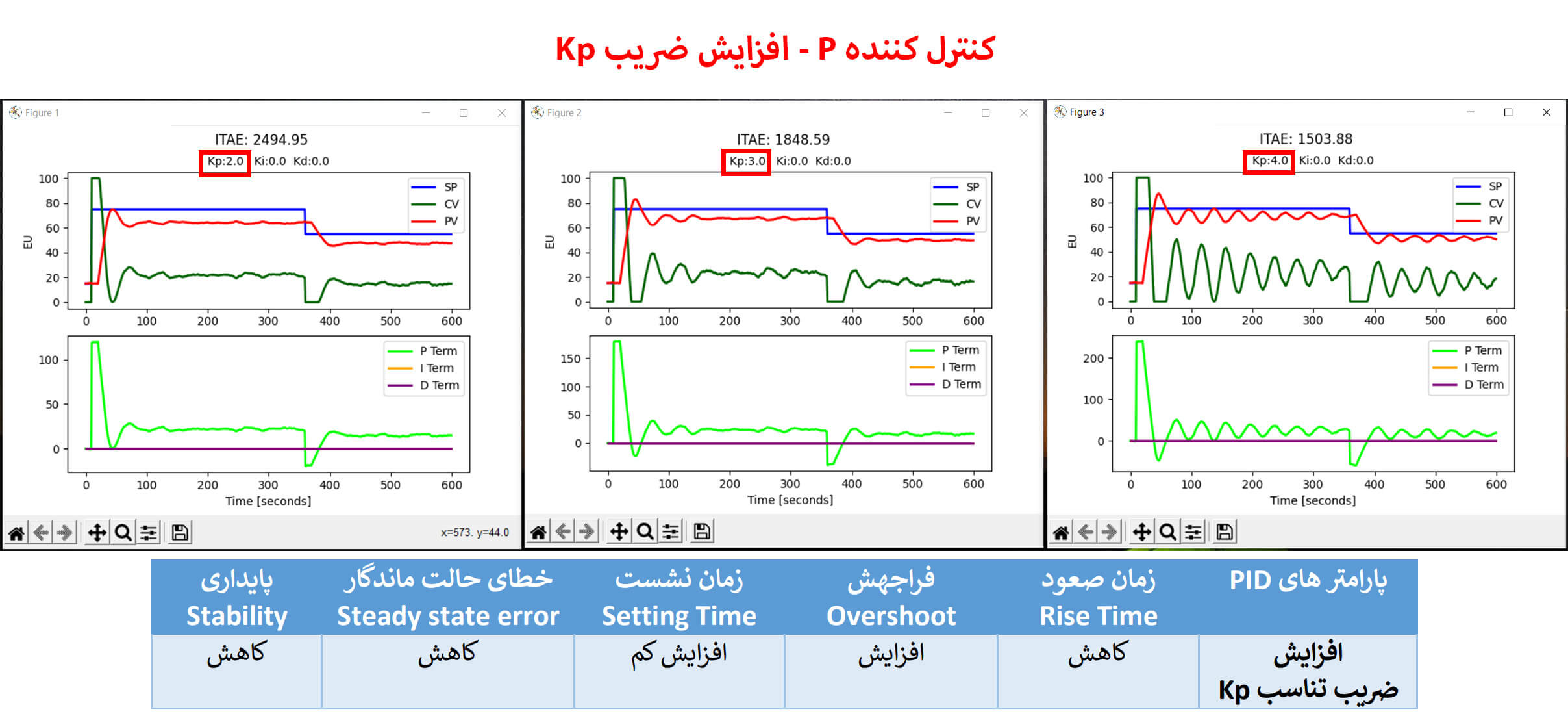
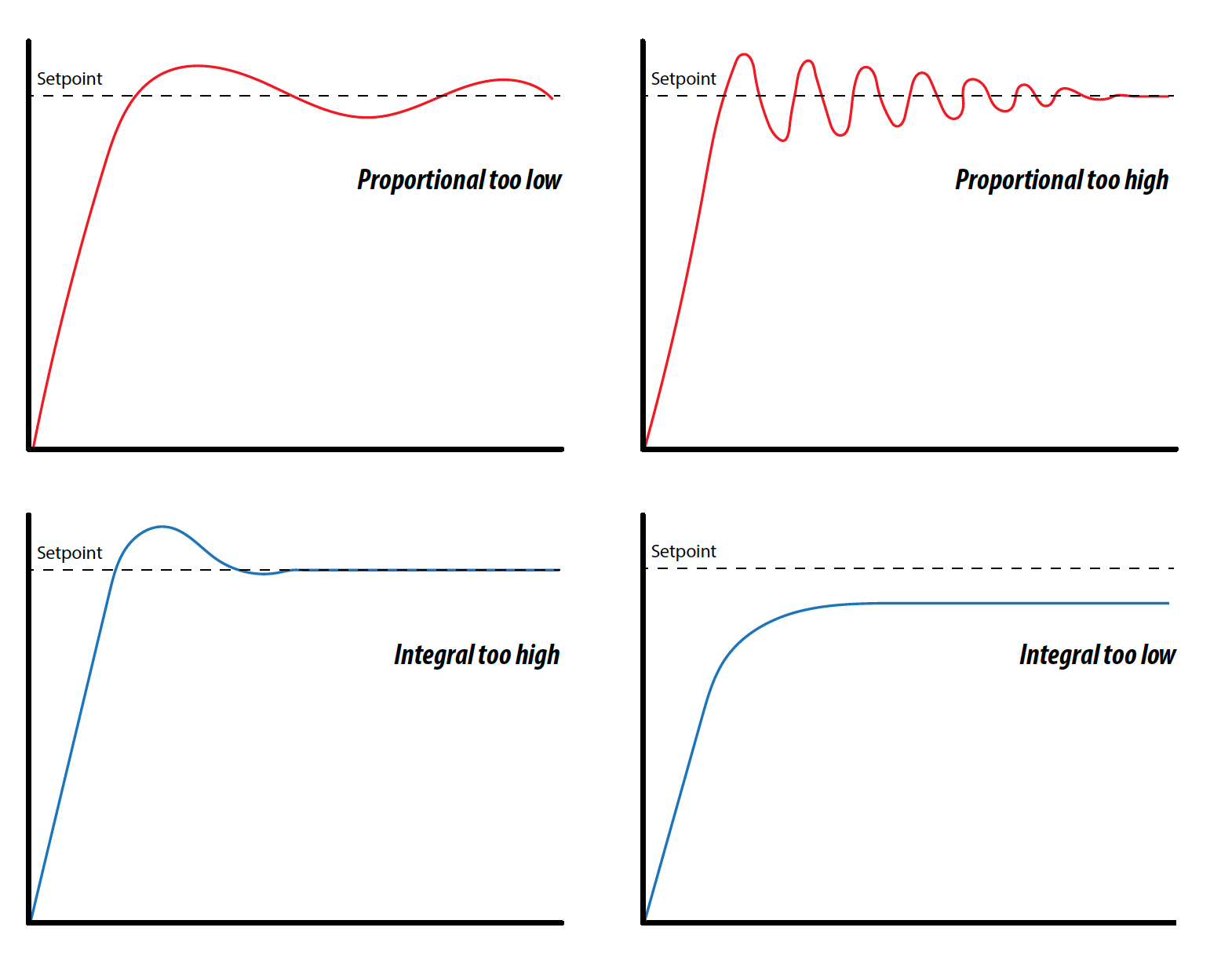
در بیشتر موارد نیروی محرکه اصلی کنترلکننده است. خروجی کنترلکننده متناسب با بزرگی خطا میباشد. همچنین این پارامتر را بهره کنترلکننده هم یاد میکنند. اگر بهره تناسب را عدد بالایی تنظیم کنیم، ناپایداری سیستم بیشتر شده و سیستم نوسان میکند. از طرفی بهره تناسب اگر عدد پایین تنظیم گردد، خطاهای کوچک برطرف نمیشوند. در این کنترلکننده پاسخ سیستم سریع خواهد بود. اما خروجی سیستم به مقدار Set Point بهطور دقیق نخواهد رسید و خطای حالت ماندگار دارد.
- پاسخ انتگرالی ( پارامتر I):
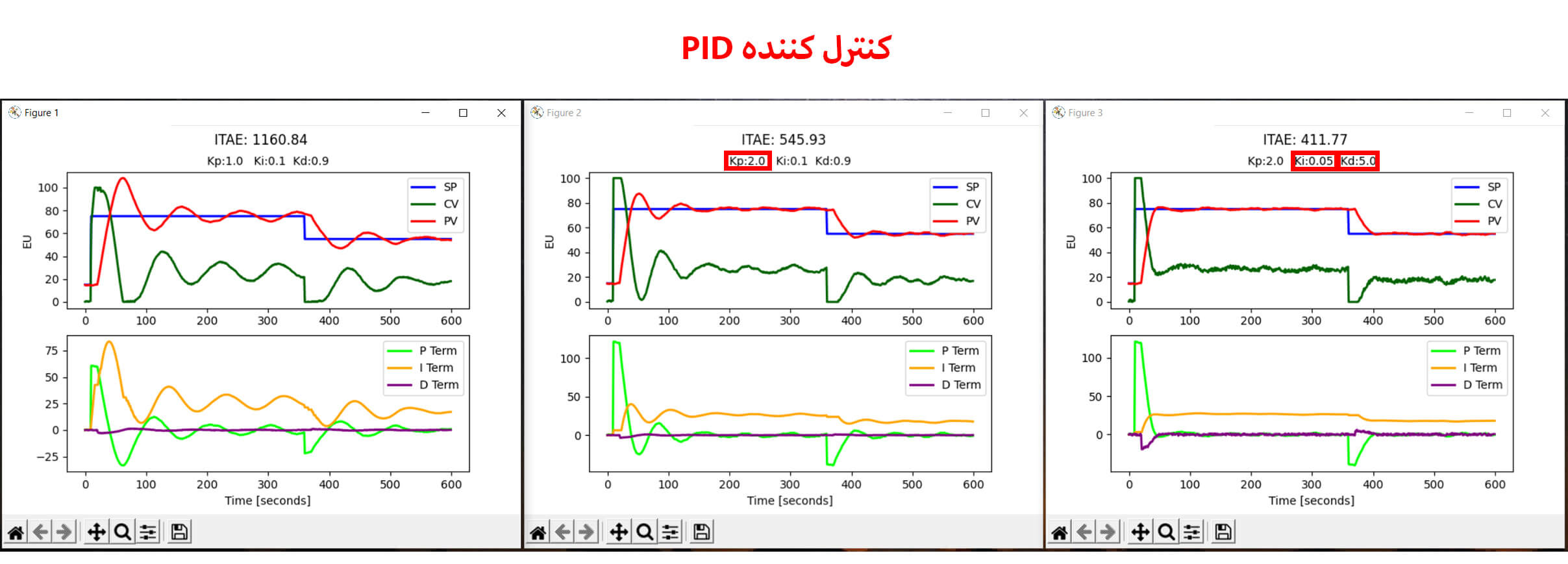
هدف اصلی استفاده از پارامتر انتگرالی حذف خطای حالت ماندگار است. با تنظیم این پارامتر میتوان سرعت عملکرد این کنترلکننده را تنظیم کرد. هرچه مقدار پارامتر بیشتر باشد، سیستم کندتر عمل میکند. تغییرات بر اساس تاریخچه خطاها اعمال میشود و حساسیت نسبت به نویز پایین است. این کنترلکننده بهطورکلی کند هست و پیادهسازی آن آسان نیست.
- پاسخ مشتقی (پارامتر D):
این کنترلکننده نسبت به نرخ تغییرات خطا حساس هست، بدیهی است نسبت به نویز حساسیت بالایی داشته باشد. این کنترلکننده جهت تصحیح خطا پاسخ سیستم را بسیار سریع میدهد و سیستم را پایدار میکند. اگر سیستم شما تغییرات محیطی زیادی دارد، این کنترلکننده تأثیر بیشتری روی خروجی خواهد داشت. خروجی سیستم به مقدار Set Point بهطور دقیق نمیرسد.
عملکرد کنترلرهای PID
- کنترلکننده تناسبی (P)
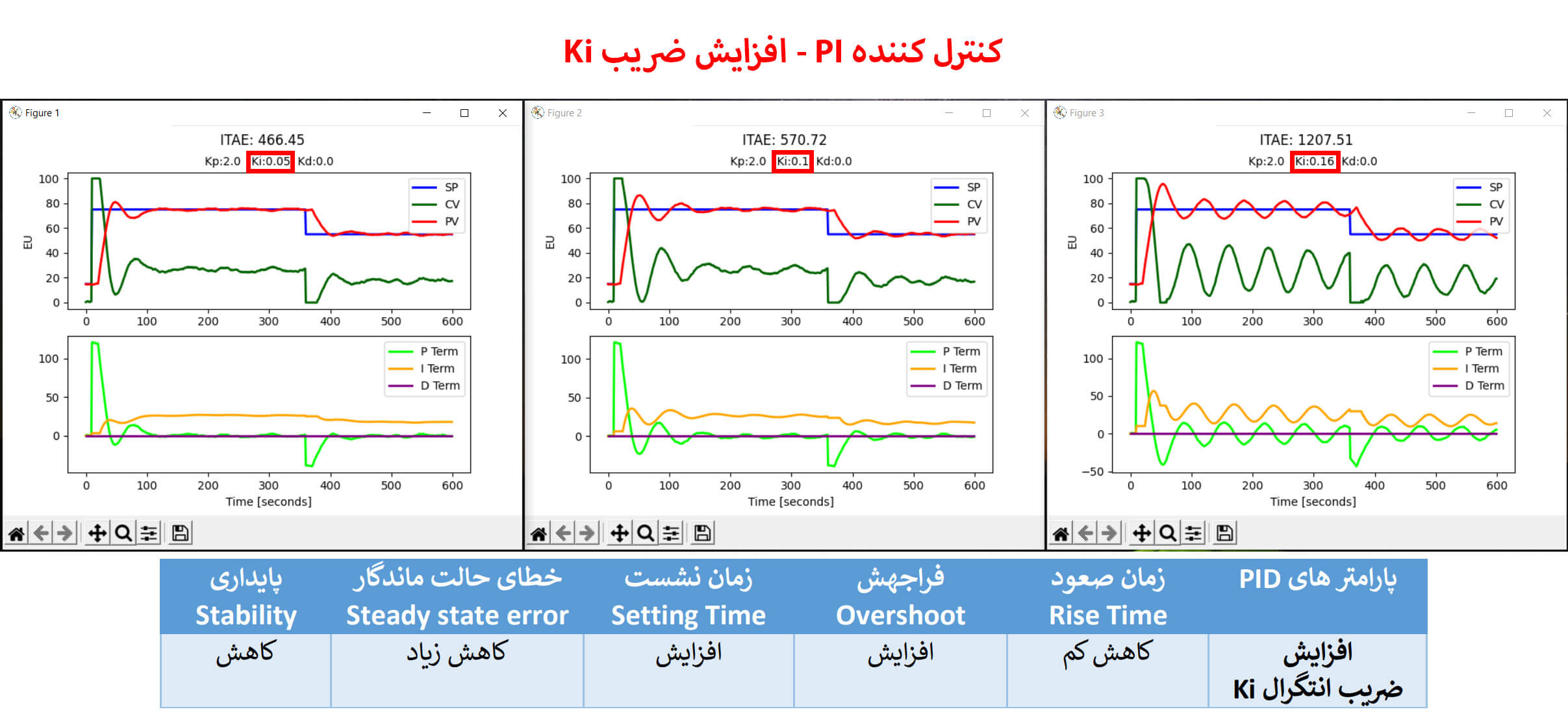
- کنترلکننده تناسبی و انتگرالی (PI)
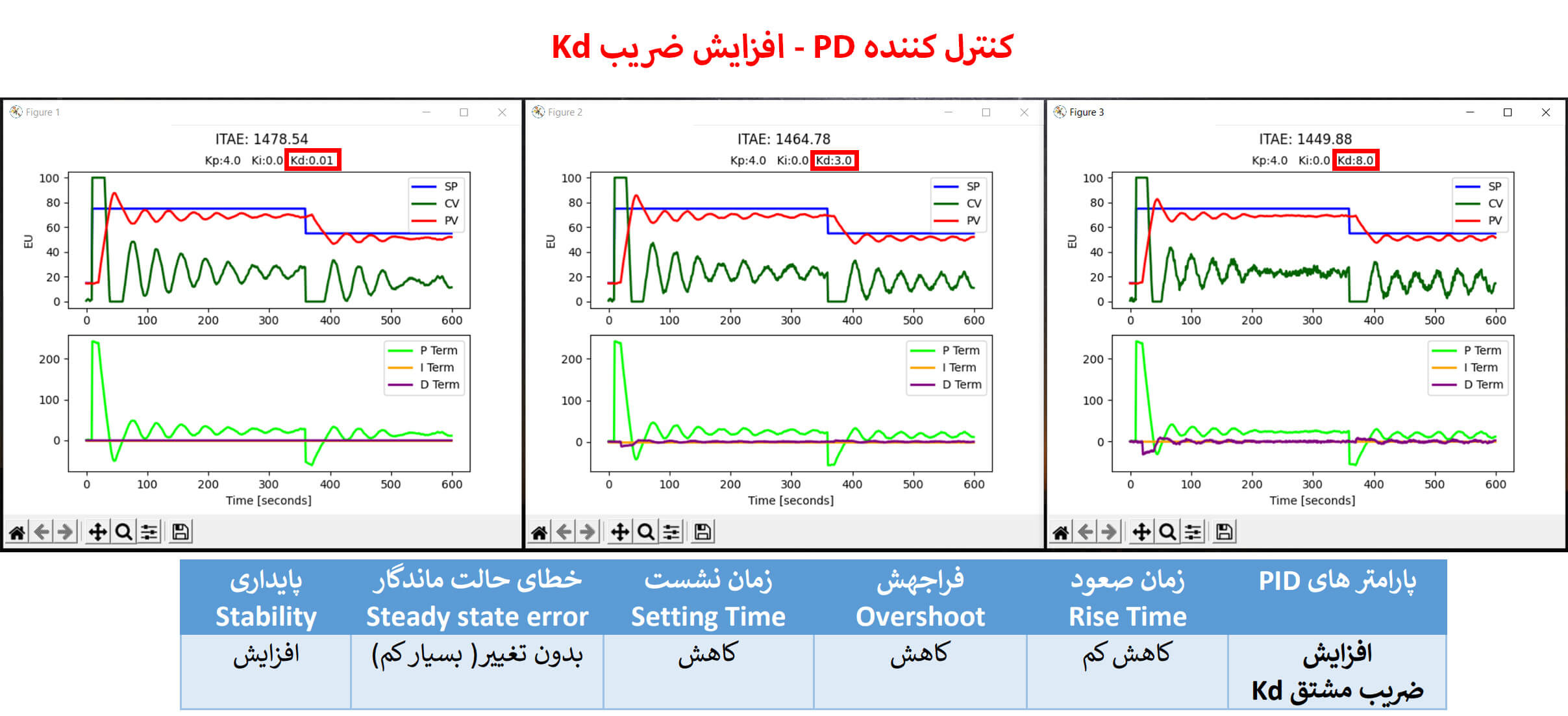
- کنترلکننده تناسبی و مشتقی (PD)
- کنترلکننده تناسبی، انتگرالی و مشتقی (PID )
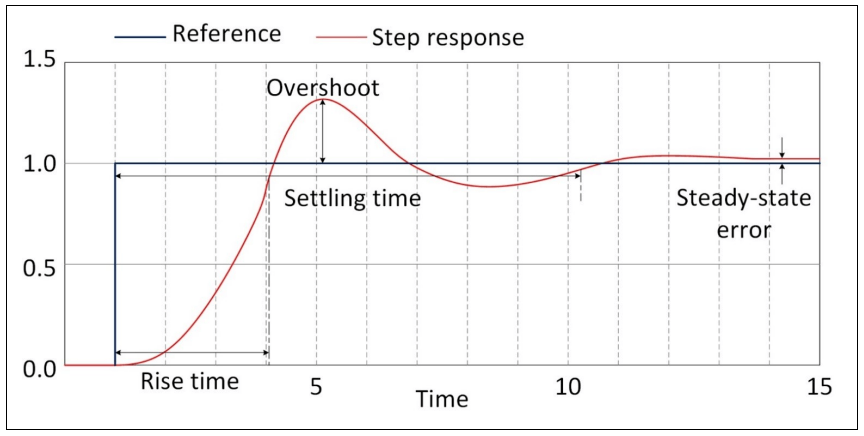
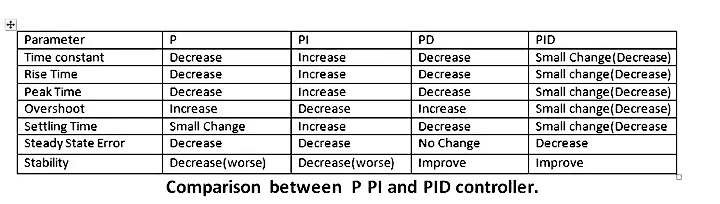
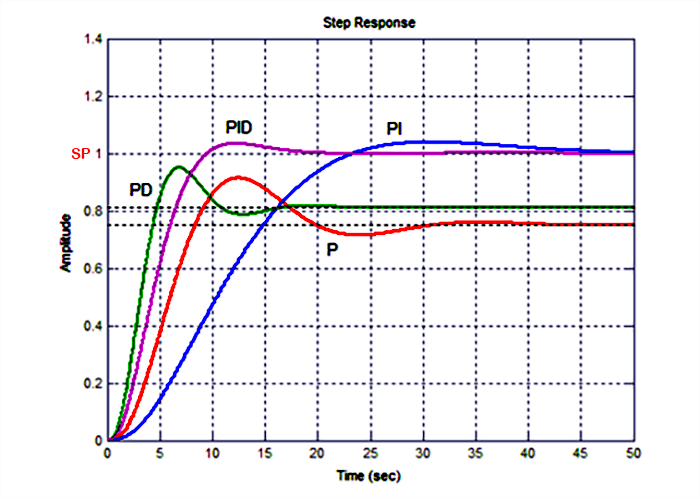
در جدول و تصاویر شبیهساز به همراه انیمیشن زیر تأثیر افزایش هرکدام از ثابتهای PID مشخصشده است. برای درک بهتر از نتیجه افزایش ضرایب روی مشخصههای خروجی (زمان صعود، فراجهش و …)، کافیه نتیجه حاصل از افزایش هر پارامتر را ابتدا روی جدول بخوانید سپس درون انیمیشن و تصاویر شبیهساز بررسی کنید.
تصاویر شبیهسازی بر اساس یک نرمافزار اپن سورس برای یک سیستم با FOPDT تنظیمشده با پارامترهای زیر:
Model Gain: 2.25 TimeConstant: 60.5 sec DeadTime: 9.99 sec
اثر نویز بر کنترلر PID
در سناریوهای عملی، سنسورها با اندازهگیری پارامترهای محیطی با نویز مواجه شده. مؤلفههای فرکانس بالای نویز منجر به مقادیر بزرگی در سیگنال مشتق ناشی از کنترلر مشتقی میشود. درنتیجه، سیگنال کنترل ممکن است بیشازحد بزرگ شود و عملگرها به اشباع بروند. یک راه عملی برای حل معضل فوق استفاده از یک فیلتر پایین گذر مرتبه اول در خروجی مشتق گیر است. اما در بیشتر کنترلکنندهها به دلیل حساسیت بخش مشتق نسبت به سیگنالهای نویز عمدتاً در سناریوهای واقعی این قسمت حذف میشود و از یک کنترلکننده بهصورت PI استفاده میکنند.
روش های تنظیم کنترلر PID (Tuning)
فرایند یافتن این مقادیر ثابت PID، تیونینگ (tuning) نام دارد. در هر کاربردی ضرایب کنترلر PID متفاوت است و پاسخ بهینه منحصر به فرد دارد. ضرایب PID نیز میتوانند با روش های شناخته شدهای مانند تابع انتقال به صورت بهینه محاسبه شوند، اگرچه در کاربردهای عملی، بطور قابل قبول میتوان با آزمون و خطا و مشاهده رفتار سیستم بطور تقریبی تعیین گردند. در روش ازمون و خطا، اپراتور مقدار پارامتر های ثابت PID را تخمین زده و عملکرد کنترلر را تست میکند تا به نتیجه مطلوب برسد. اما در بعضی از سیستم ها امکان شرایط تست وجود ندارد و بهتره از روش های دیگر محاسبه انجام شود. امکان شبیه سازی کنترلر PID در نرم افزار متلب وجود دارد و ابزار های لازم در محیط Simulink قرار گرفته است.
برای تنظیم پارامترهای PID روشهای متنوع وجود دارد. عبارتاند از:
- روش آزمونوخطا
- روش Open loop PID Tuning
- روش Closed loop Ziegler and Nichols tuning
- روش استفاده از الگوریتمهای اکتشافی مبتنی بر الگوریتم ژنتیک (Genetic Algorithms)
- روش رله
- استفاده از نرمافزار
جهت بررسی راهکارهای تنظیم پارامترهای PID در گلخانه هوشمند برای کنترل اقلیم گلخانه، مقالاتی منتشرشده است. برای بررسی مقالهای با عنوان Self-Tuning PID Control for Greenhouse به این لینک مراجعه کنید.



