راه اندازی ماژول شتاب سنج و زاویه سنج ICM42688 با آردوینو
سنسورهای IMU (واحد اندازهگیری اینرسی) امروزه به عنوان یکی از اجزای کلیدی در بسیاری از سیستمهای مدرن استفاده میشوند. این سنسورها قابلیت اندازهگیری شتاب (با استفاده از شتابسنج) و چرخش زاویهای (با استفاده از ژیروسکوپ) در سه محور مختصات را دارند، به طوری که ترکیب این دو قابلیت، امکان ردیابی دقیق حرکت را فراهم میکند.

معرفی ICM42688-P
ICM42688 سنسور IMU (واحد اندازهگیری اینرسی) از شرکت TDK InvenSense هستند که MEMS می باشد و برای ردیابی حرکت در دستگاههای مختلف استفاده می شود. این سنسور قابلیت اندازهگیری شتاب و زاویه در سه محور (6 محور کلی) را دارد و در برنامه هایی مانند رباتیک، پهپادها، دستگاههای واقعیت افزوده و مجازی (AR/VR) و الکترونیک مصرفی به کار می رود. در واقع این سنسور نسخه بروز شده سنسور معروف MPU6050 هست که دیگر تولید نمی شود. همچنین این سنسور دقت بالاتر ، نویز پذیری کمتر و نرخ داده بالاتری نسبت به نسل قبلی خود یعنی MPU6050 دارد.

در این مطلب ما از ماژول این تراشه استفاده میکنیم که از فروشگاه امبددتک قابل تهیه است.

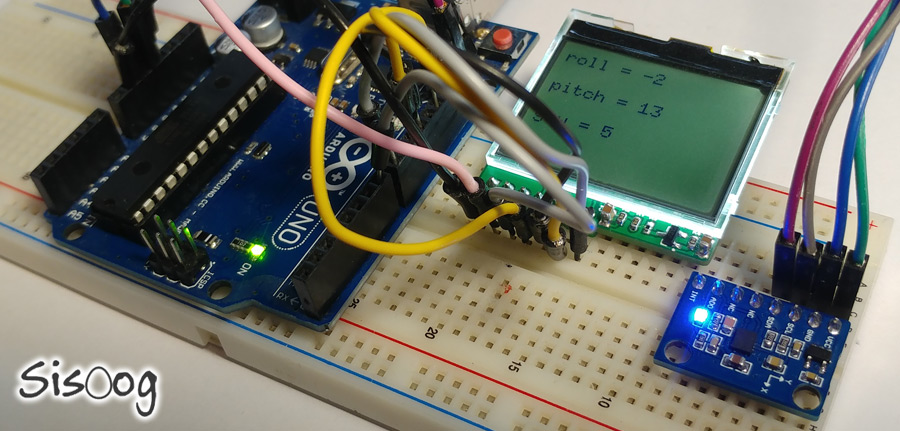
راه اندازی ICM42688 با آردوینو UNO و نمایش Roll , Pitch , Yaw روی نمایشگر Nokia 1202
سخت افزار مورد نیاز
- LCD Nokia 1202
- آردوینو UNO
- ماژول ICM42688
نحوه اتصال سخت افزار

برای استفاده از سنسور ICM42688 ابتدا باید کتابخانه آردوینوی آن فراخوانی شود. از طریق این لینک می توانید به کتابخانه ها و برنامه نوشته شده دسترسی داشته باشید. برای اضافه کردن کتابخانه مورد نظر ابتدا در نرم افزار آردوینو به مسیر Sketch -> Include Library -> Add .ZIP Library رفته و فایل ICM42688.zip و u8g2-ste2007-main.zip را اضافه می کنیم. همچنین می توانید برای آشنایی بیشتر با LCD نوکیا و نحوه کار کردن با آن از این لینک دیدن کنید.

بررسی برنامه :
|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 129 130 131 |
#include <Arduino.h> #include <U8g2lib.h> #include "ICM42688.h" #ifdef U8X8_HAVE_HW_SPI #include <SPI.h> #endif #ifdef U8X8_HAVE_HW_I2C #include <Wire.h> #endif ///LCD//////////// #define LCD_BACKLIGHT 7 #define LCD_CS 10 ////////////////// U8G2_STE2007_96X68_F_3W_SW_SPI u8g2(U8G2_R0, /* clock=*/ 13, /* data=*/ 11, /* cs=*/ 10, /* reset=*/ 8); ICM42688 IMU(Wire, 0x68); void u8g2_prepare(void) { u8g2.setFont(u8g2_font_6x10_tf); u8g2.setFontRefHeightExtendedText(); u8g2.setDrawColor(1); u8g2.setFontPosTop(); u8g2.setFontDirection(0); } void interrupt_setup(){ cli();//stop interrupts //set timer1 interrupt at 5Hz TCCR1A = 0;// set entire TCCR1A register to 0 TCCR1B = 0;// same for TCCR1B TCNT1 = 0;//initialize counter value to 0 // set compare match register for 5hz increments OCR1A = 49999;// = (16*10^6) / (1*1024) - 1 (must be <65536) // turn on CTC mode TCCR1B |= (1 << WGM12); // Set CS12, CS11 and CS10 bits for 64 prescaler TCCR1B |= (0 << CS12) | (1 << CS11) | (1 << CS10); // enable timer compare interrupt TIMSK1 |= (1 << OCIE1A); sei();//allow interrupts } void setup(void) { pinMode(LCD_BACKLIGHT, OUTPUT); digitalWrite(LCD_BACKLIGHT, HIGH); u8g2.begin(); Serial.begin(115200); while(!Serial) {} // start communication with IMU int status = IMU.begin(); if (status < 0) { Serial.println("IMU initialization unsuccessful"); Serial.println("Check IMU wiring or try cycling power"); Serial.print("Status: "); Serial.println(status); while(1) {} } // setting the accelerometer full scale range to +/-8G IMU.setAccelFS(ICM42688::gpm8); // setting the gyroscope full scale range to +/-500 deg/s IMU.setGyroFS(ICM42688::dps500); // set output data rate to 12.5 Hz IMU.setAccelODR(ICM42688::odr12_5); IMU.setGyroODR(ICM42688::odr12_5); interrupt_setup(); } unsigned long timer = 0; float roll = 0.00, pitch = 0.00 ,yaw = 0.00; float timeStep = 0.01; char temp[10]; char temp1[10]; char temp2[10]; int i; void loop(void) { // read the sensor timer = millis(); IMU.getAGT(); // display the data roll = atan2(IMU.accY() , IMU.accZ()) * 57.3; pitch = atan2((- IMU.accX()) , sqrt(IMU.accY() * IMU.accY() + IMU.accZ() * IMU.accZ())) * 57.3; yaw = (yaw + IMU.gyrZ()/100); delay((timeStep*1000) - (millis() - timer)); } ISR(TIMER1_COMPA_vect){ u8g2.clearBuffer(); u8g2_prepare(); sprintf(temp, "roll = %d ",(int)roll); u8g2.drawStr( 0, 0, temp); sprintf(temp1, "pitch = %d ", (int)pitch); u8g2.drawStr( 0, 20, temp1); sprintf(temp2, "yaw = %d ", (int)yaw); u8g2.drawStr( 0, 40, temp2); u8g2.sendBuffer(); } |
در این برنامه خواندن اطلاعات IMU با استفاده از حلقه loop و نمایش اطلاعات در غالب Roll , Pitch , Yaw بر روی LCD با استفاده از وقفه تایمر انجام شده است. خط 18 شئ u8g2 را تعریف می کند که با استفاده از این شئ پایه متصل شده به LCD تغییر می کند. خط 20 شئ IMU را تعریف می کند که مشخص می کند که پروتکل ارتباطی ماژول I2C و آدرس آن 0X68 می باشد. تابع u8g2_prepare تنظیمات فونت اندازه رشته مورد نظر بر روی LCD را تعیین می کند. تابع interrupt_setup تنظیمات مربوط به وقفه تایمر می باشد که بر روی 5Hz تنظیم شده است. خط 64 تا 72 بررسی می کند چنانچه ماژول به آردوینو وصل نبود برنامه در این نقطه می ایستد. خط 75 محدوده مقیاس کامل برای شتاب سنج را مشخص می کند. محدوده مقیاس کامل برای شتاب سنج ها به طور کلی بسته به پلت فرم سخت افزاری ± 2/±4/±8/±16 گرم قابل برنامه ریزی است. هرچه رنج کمتر باشد، شتاب سنج به سیگنال های دامنه کمتر حساس تر خواهد بود. به عنوان مثال، برای اندازهگیری ارتعاشات کوچک روی میز، استفاده از یک FSR 2g دادههای دقیقتری را ارائه میکند، زیرا به هر شتاب جزئی بسیار حساس است، در حالی که استفاده از محدوده 16 گرمی ممکن است برای اندازهگیری ارتعاشات فردی که راه میرود مناسبتر باشد.
خط 77 نرخ نمونه برداری (ODR) را مشخص می کند. ODR سرعتی است که حسگر اندازهگیریها یا نمونههای جدیدی را به دست میآورد. ODR بر حسب تعداد نمونه در ثانیه (Hz) اندازه گیری می شود. تنظیمات ODR بالاتر منجر به نمونه های بیشتری در ثانیه می شود. بستههای حسگر مختلف اغلب با چندین ODR موجود عرضه میشوند، و معمولاً این به توسعهدهنده برنامه بستگی دارد که بر اساس نیازهای برنامه، از کدام ODR استفاده کند.
خط 100 عملیات خواندن از سنسور IMU را در محور های X , Y انجام می دهد و مقادیر خام خوانده شده را در دو متغیر IMU.accX , IMU.accY ذخیره می کند. برای خواندن محور Z نمی توان صرفا از شتاب سنج استفاده کرد چرا که چرخش حول محور Z (Yaw) به معنای دوران جسم به دور محور Z است. این نوع چرخش زاویهای است، و به تغییرات موقعیت زاویهای مرتبط است، نه تغییرات در شتاب خطی. شتابسنج تنها میتواند تغییرات در شتاب خطی ناشی از حرکت یا نیروی گرانش را حس کند. وقتی جسم حول محور Z میچرخد، هیچ تغییر شتاب خطی خاصی در محورهای X، Y یا Z رخ نمیدهد که شتابسنج بتواند آن را بهطور مستقیم تشخیص دهد. بنابراین، ژیروسکوپ برای تشخیص و اندازهگیری Yaw لازم است، زیرا ژیروسکوپ میتواند نرخ تغییر زاویه حول محور Z را اندازهگیری کند، که برای محاسبه زاویه Yaw ضروری است.

در خطوط 103 و 104 اعداد خام roll و Pitch در خروجی سنسور به زوایای واقعی بین 0-360 درجه تبدیل شده اند. برای اطلاعات بیشتر میتوان به این لینک اشاره کرد.
نحوه محاسبه YAW با دو محور دیگر همانطور که گفته شد متفاوت است و این کار با استفاده از ژیروسکوپ انجام می شود. توجه شود که در این برنامه محاسبه YAW به صورت کاملا تقریبی می باشد. در محاسبه دقیق YAW باید از سنسور قطب نما (Compass) یا از روش های پیچیده دیگری همچون GPS ، INS یا روش های پیچیده ریاضی همچون فیلتر کالمن استفاده کرد.
✅دانلود کتابخانه و کد آردوینو ماژول ICM42688
خرید ماژول ژیروسکوپ و شتاب سنج 6 محوره ICM 42688 :





طراحی، تولید و فروش محصولات الکترونیک | embeddedtech.ir
مقالات بیشتر

پالت | بازار خرید و فروش قطعات الکترونیک
قطعات اضافه و بدون استفاده همیشه یکی از سربارههای شرکتها و طراحان حوزه برق و الکترونیک بوده و هست. پالت سامانهای است که بصورت تخصصی اجازه خرید و فروش قطعات مازاد الکترونیک را فراهم میکند. فروش در پالت
آیسی | موتور جستجوی قطعات الکترونیک
سامانه آی سی سیسوگ (Isee) قابلیتی جدید و کاربردی از سیسوگ است. در این سامانه سعی شده است که جستجو، انتخاب و خرید مناسب تر قطعات برای کاربران تسهیل شود. جستجو در آیسی
سیسوگشاپ | فروشگاه محصولات Quectel
فروشگاه سیسوگ مجموعه ای متمرکز بر تکنولوژی های مبتنی بر IOT و ماژول های M2M نظیر GSM، GPS، LTE، NB-IOT، WiFi، BT و ... جایی که با تعامل فنی و سازنده، بهترین راهکارها انتخاب می شوند. برو به فروشگاه سیسوگ
سیسوگ فروم | محلی برای پاسخ پرسشهای شما
دغدغه همیشگی فعالان تخصصی هر حوزه وجود بستری برای گفتگو و پرسش و پاسخ است. سیسوگ فروم یک انجمن آنلاین است که بصورت تخصصی امکان بحث، گفتگو و پرسش و پاسخ در حوزه الکترونیک را فراهم میکند. پرسش در سیسوگ فرم
سیکار | اولین مرجع متن باز ECU در ایران
بررسی و ارائه اطلاعات مربوط به ECU (واحد کنترل الکترونیکی) و نرمافزارهای متن باز مرتبط با آن برو به سیکار







سیسوگ با افتخار فضایی برای اشتراک گذاری دانش شماست. برای ما مقاله بنویسید.