کنترل موتور BLDC | مقایسه 6-Step، سینوسی و FOC
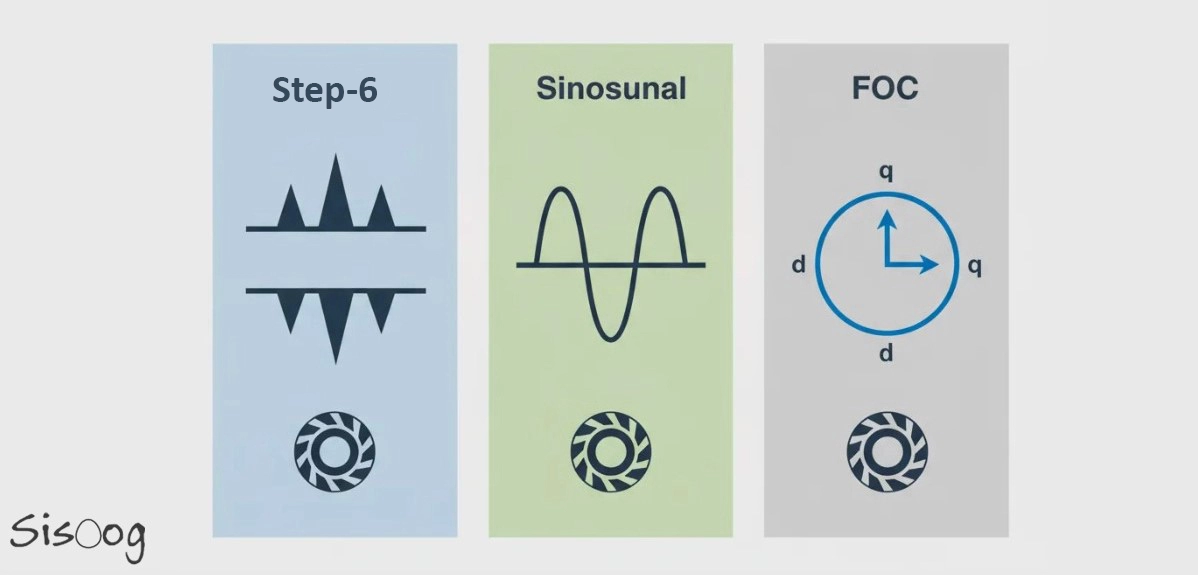
به طور کلی برای کنترل موتورهای BLDC (یا هر موتور سهفاز دیگر) روشهای مختلفی وجود دارد که بسته به نیاز و هزینه، میتوان از یکی از آنها استفاده کرد.

در آموزش قبلی «موتور براشلس، از تاریخچه تا طراحی درایو» درباره روش معمول ۶Step (یا همان Trapezoidal Commutation) صحبت کردیم. روشی که علیرغم سادگی، قیمت مناسبی نیز در پیادهسازی دارد، اما چند عیب مهم دارد که کاربرد آن را در برخی موارد محدود میکند، از جمله:
- گشتاور متغیر
- بازده کمتر نسبت به FOC
- صدای بیشتر (به دلیل استفاده از شکل موج غیرسینوسی و تغییر ناگهانی جریان هر سیمپیچ)
- عدم کارکرد درست در دورهای پایین
بیایید کمی بیشتر درباره ایراد گشتاور متغیر صحبت کنیم.
به تصویر زیر توجه کنید:
فرض کنید موتور مطابق شکل در حال چرخش است. به دلیل ثابت بودن جریان هر سیمپیچ و تغییر ناگهانی جریان، باعث میشود گشتاور دائماً تغییر کند و نتوان توان ثابت و پایدار از موتور گرفت.
این اتفاق هر ۶۰ درجه رخ میدهد و برای موتوری که نیاز به کنترل دقیق دارد، اصلاً مناسب نیست.


با توجه به صحبتهایی که گفته شد، برای کنترل بهتر موتور و دستیابی به حداکثر راندمان و گشتاور دقیق، باید به سراغ FOC برویم.
اما بهتر است ابتدا کمی درباره روش کنترل سینوسی (Sinusoidal PWM) صحبت کنیم.
کنترل به روش Sinusoidal PWM
این روش نسبت به روش 6-step کمی پیچیدهتر، اما از روش FOC سادهتر است.
تفاوت اصلی این روش، استفاده از شکل موج سینوسی به جای شکل موج مربعی در روش 6-step ، همگام (سینکشده) با موقعیت روتور میباشد.
البته بخش نسبتاً پیچیده این روش، همان سینک کردن شکل موج سینوسی با موقعیت روتور است که نیازمند اندازهگیری یا تخمین دقیق زاویه الکتریکی موتور است.

در تصویر بالا میتوانید بلوکدیاگرام یک کنترلکننده سینوسی را مشاهده کنید.
همانطور که مشخص است، سه شکل موج سینوسی با اختلاف فاز ۱۲۰ درجه، بر اساس موقعیت روتور تولید و به موتور اعمال میشود.
در این روش جریان لحظهای موتور نیز محاسبه میگردد، بهطوریکه دیگر تغییرات ناگهانی جریان و در نتیجه تغییر ناگهانی گشتاور وجود ندارد.
مزایای استفاده از روش Sinusoidal PWM:
- گشتاور نرمتر نسبت به روش ذوزنقهای (6-step)
- صدای کمتر
- مناسب برای سرعتهای پایین
- راهاندازی سادهتر نسبت به FOC
معایب استفاده از این روش:
- بازده پایینتر نسبت به FOC
- نیاز به پردازش بیشتر نسبت به روش ذوزنقهای → افزایش قیمت نهایی
- نیاز به دانستن موقعیت روتور (تشخیص با سنسور اثر هال یا روش Sensorless)
مقایسه دو روش سینوسی و 6-step
برای درک بهتر، میتوانیم این دو روش که پیشتر توضیح داده شد (سینوسی و 6-step) را از جنبههای مختلف با یکدیگر مقایسه کنیم.
تولید شکل موج مرجع
- 6-step
- فقط شش حالت کلیدزنی داره (هر 60° الکتریکی یک بار تغییر میکنه). شکل موج مربعی و ناپیوسته
- نیاز به Lookup Table ساده برای سوئیچینگ
- Sinusoidal PWM
- سیگنالهای مرجع سینوسی با اختلاف فاز 120° تولید میشن
- نیاز به Lookup Table سینوسی + الگوریتم PWM
فیدبک و کنترل
- 6-step
- معمولاً فقط به Hall Sensor یا Back-EMF نیاز داره تا بگه روتور کجاست. کنترل جریان دقیق انجام نمیشه
- ساده و بدون حلقه جریان
- Sinusoidal PWM
- از Encoder / Hall برای موقعیت + سنسور جریان برای حلقه کنترلی استفاده میشه
- شامل PI Controller برای اصلاح جریان هر فاز
سیگنال درایو به موتور
- 6-step
- در هر لحظه ۲ فاز روشن، یک فاز آزاد. ولتاژ خروجی به شکل پلهای (Trapz)
- نویز و Torque Ripple بالاتر
- Sinusoidal PWM
- سه فاز همزمان با شکل سینوسی تحریک میشن. جریان پیوسته و نرم
- گشتاور یکنواختتر و نویز کمتر
پیچیدگی سختافزار / نرمافزار
- 6-step
- سادهترین پیادهسازی
- پردازشگر ضعیف هم کافیه
- مناسب برای فن، پمپ، کمپرسور
- Sinusoidal PWM
- کمی پیچیدهتر
- نیازمند میکروکنترلر با PWM پیشرفته و توان پردازشی بالاتر
- کاربرد در وسایل خانگی بیصدا، درایوهای صنعتی متوسط
حالا وقت آن است که از خودمان بپرسیم: FOC چه مزیتی دارد که به سراغش برویم؟
پاسخ ساده است: در این روش هم انرژی کمتری مصرف میکنیم و هم عملکرد موتور روانتر و قدرتمندتری خواهیم داشت.
اصلاً FOC چیست؟
FOC (Field Oriented Control یا کنترل برداری میدان) یک روش پیشرفته و برداری برای کنترل موتورهای جریان متناوب مانند BLDC و PMSM است.
هدف اصلی این روش، کنترل دقیق مقدار و جهت جریانها و ولتاژهای سهفاز موتور بهگونهای است که میدان مغناطیسی تولیدشده در استاتور همواره در زاویه بهینه (معمولاً 90∘ (نسبت به میدان مغناطیسی روتور قرار بگیرد.
این همترازی برداری باعث میشود:
- گشتاور ثابت تولید شود.
- راندمان انرژی بهشدت افزایش یابد، چون جریانها فقط در راستای مؤثر برای تولید نیروی مکانیکی هدایت میشوند.
- لرزش و نوسان گشتاور (Torque Ripple) حتی در سرعتهای پایین به حداقل برسد.

تصویر بالا، بلوکدیاگرام یک کنترلکننده FOC را نشان میدهد.
در این روش، جریانها با استفاده از تبدیلهای ریاضی کلارک و پارک به یک دستگاه مختصات دومحوره (d,q) تبدیل میشوند:
- محور q → مؤلفه جریان تولیدکننده گشتاور
- محور d → مؤلفه جریان تولیدکننده شار میدان مغناطیسی
این مؤلفهها بهصورت جداگانه کنترل میشوند تا عملکرد موتور در شرایط مختلف (سرعت، بار، دما) همواره در حالت بهینه باقی بماند.
سپس با تبدیل معکوس پارک و کلارک، ولتاژهای سهفاز (Ua,Ub,Uc) بهینه تولید شده و به موتور اعمال میشوند.
مسیر پردازش FOC
فرض کنید موتوری دارید و از جریانهای Ia,Ib,Ic نمونهبرداری میکنید (معمولاً اندازهگیری دو فاز کافی است، چون 0 (Ia+Ib+Ic=
تبدیل کلارک (Clarke Transformation) – از abc به αβ
فرمول تبدیل جریانها

این تبدیل سه فاز را در یک سیستم مختصات دوبعدی ثابت (α, β) نمایش میدهد.
تبدیل پارک (Park Transformation) – از αβ به dq
اکنون زاویه الکتریکی روتور θ را که با سنسور موقعیت (انکودر، هال، سنسور بک EMF) میگیریم، وارد فرمول میکنیم:

-
- Id → جریان در راستای میدان شار روتور (کنترل شار)
- Iq → جریان عمود بر میدان شار روتور (تولید گشتاور)
- کنترل جریانها :
در FOC معمولاً:
![]()
تا شار ثابت بماند، و فقط:

کنترلکنندههای PI جداگانه برای هر محور داریم:
- کنترلکننده محور d → خروجی VdVd
- کنترلکننده محور q → خروجی VqVq
این خروجیها ولتاژ هدف در فضای dq هستند.
تبدیل معکوس پارک – از dq به αβ

تبدیل معکوس کلارک – از αβ به abc

حالا ولتاژ سهفاز به دست میآید و به روشهایی مثل SinePWM یا SVPWM روی موتور اعمال میشود.
بهنظر من بخش پایانی این مقاله کمی خستهکننده و نامفهوم است، اما اگر یک مثال عملی برای آن ارائه کنیم، مطلب میتواند کاملاً روشن و واضح شود.
قصد دارم در بخش بعدی، در ادامهی مبحث آشنایی با موتورها و روشهای کنترولی، یک نمونهی ساده و مثال عملی از FOC را پیادهسازی کنم.
و البته اگر فکر میکنید پایان FOC همینجا است، سخت در اشتباه هستید! 😊



وبسایت: http://typhoonic.ir
.:: علاقهمند به حوزهی سختافزار و طراحی و توسعهی درایوهای موتورهای براشلس (BLDC) و موتورهای AC ::.
مقالات بیشتر

پالت | بازار خرید و فروش قطعات الکترونیک
قطعات اضافه و بدون استفاده همیشه یکی از سربارههای شرکتها و طراحان حوزه برق و الکترونیک بوده و هست. پالت سامانهای است که بصورت تخصصی اجازه خرید و فروش قطعات مازاد الکترونیک را فراهم میکند. فروش در پالت
آیسی | موتور جستجوی قطعات الکترونیک
سامانه آی سی سیسوگ (Isee) قابلیتی جدید و کاربردی از سیسوگ است. در این سامانه سعی شده است که جستجو، انتخاب و خرید مناسب تر قطعات برای کاربران تسهیل شود. جستجو در آیسی
سیسوگشاپ | فروشگاه محصولات Quectel
فروشگاه سیسوگ مجموعه ای متمرکز بر تکنولوژی های مبتنی بر IOT و ماژول های M2M نظیر GSM، GPS، LTE، NB-IOT، WiFi، BT و ... جایی که با تعامل فنی و سازنده، بهترین راهکارها انتخاب می شوند. برو به فروشگاه سیسوگ
سیسوگ فروم | محلی برای پاسخ پرسشهای شما
دغدغه همیشگی فعالان تخصصی هر حوزه وجود بستری برای گفتگو و پرسش و پاسخ است. سیسوگ فروم یک انجمن آنلاین است که بصورت تخصصی امکان بحث، گفتگو و پرسش و پاسخ در حوزه الکترونیک را فراهم میکند. پرسش در سیسوگ فرم
سیکار | اولین مرجع متن باز ECU در ایران
بررسی و ارائه اطلاعات مربوط به ECU (واحد کنترل الکترونیکی) و نرمافزارهای متن باز مرتبط با آن برو به سیکار







سیسوگ با افتخار فضایی برای اشتراک گذاری دانش شماست. برای ما مقاله بنویسید.