موتورهای براشلس، ساختار، تا طراحی درایور
در این مقاله قصد داریم اطلاعات خود را درباره موتورهای براشلس افزایش دهیم. از تاریخچه این موتورها و کاربردهای آنها گرفته تا نحوه ساخت یک نمونه درایور یا بهاصطلاح ESC برای آنها

اولازهمه، موتورهای براشلس از کجا شروع شد و به کجا رسید؟
موتورهای BLDC (مخفف Brushless DC Motor، به معنای موتور جریان مستقیم بدون جاروبک) یکی از پیشرفتهترین انواع موتورهای الکتریکی هستند که بهویژه در صنایع مدرن بهطور گسترده مورداستفاده قرار میگیرند. این موتورها به دلیل حذف جاروبک (Brush) که در موتورهای DC سنتی وجود داشت، مزایای متعددی از جمله کاهش سایش، افزایش بازده، و کاهش نیاز به نگهداری دارند. تاریخچه این موتورها به چند دهه اخیر بازمیگردد:
دهه 1960: ایدهپردازی و اولین نمونهها
- اولین ایدهها برای حذف جاروبکها در موتورهای DC با پیشرفت تکنولوژی نیمههادیها به ذهن مهندسان خطور کرد. توسعه ترانزیستورهای قدرت و مدارهای الکترونیکی امکان کنترل دقیق جریان و ولتاژ را فراهم کرد که برای عملکرد یک موتور BLDC ضروری است.
- در این دهه، تلاشهایی برای ساخت موتورهایی که نیازی به جاروبک نداشته باشند آغاز شد، اما محدودیتهای فناوری مانع از تولید انبوه این موتورها بود.
دهه 1970: پیشرفت در مواد مغناطیسی
- ظهور آهنرباهای دائمی با کارایی بالا، مانند آهنرباهای نئودیمیوم-آهن-بور (NdFeB)، طراحی موتورهای BLDC را بهبود بخشید. این مواد امکان تولید موتورهایی با توان و بازده بیشتر و اندازه کوچکتر را فراهم کردند.
- همچنین، کنترلکنندههای الکترونیکی پیشرفتهتر نیز در این دهه توسعه یافتند و به تولید BLDCها کمک شایانی کردند.
دهه 1980: تجاریسازی
- موتورهای BLDC در این دهه بهطور گسترده وارد بازار شدند. صنایع خودروسازی، کامپیوتر (مانند هارد دیسکها)، و لوازمخانگی از اولین حوزههای کاربرد این موتورها بودند.
- شرکتهایی نظیر “Matsushita” (پاناسونیک امروزی) و “Bosch” از پیشگامان تجاریسازی این موتورها محسوب میشوند.
دهه 1990: توسعه و گسترش کاربردها
- تکنولوژی کنترل دیجیتال و ریزپردازندهها در این دوره به بلوغ رسید و امکان کنترل بسیار دقیقتر BLDCها فراهم شد.
- این موتورها در صنایعی نظیر هوافضا، روباتیک، و خودروهای الکتریکی جایگاه ویژهای پیدا کردند.
دهه 2000 و بعد: بلوغ و نوآوری
- موتورهای BLDC در دهههای اخیر در بسیاری از دستگاههای روزمره، از پهپادها و خودروهای الکتریکی گرفته تا لوازم پزشکی، بهطور گسترده مورداستفاده قرار گرفتهاند.
- پیشرفت در تکنولوژی باتریها و رشد وسایل نقلیه الکتریکی، تقاضا برای این موتورها را بهطور چشمگیری افزایش داده است.
موتورهای BLDC اکنون بهعنوان یکی از اجزای اصلی بسیاری از فناوریهای مدرن شناخته میشوند و همچنان در حال پیشرفت و نوآوری هستند.
انواع موتور براشلس

بهطورکلی، موتورهای BLDC در دو مدل سنسوردار و بدون سنسور تولید میشوند.
- در مدل سنسوردار، از سنسورهای اثر هال (Hall Effect Sensors) برای تشخیص موقعیت دقیق روتور و هماهنگی جریان استاتور استفاده میشود. این نوع موتور بیشتر در کاربردهایی با سرعت پایین و کنترلهای دقیق مورداستفاده قرار میگیرد.

در مدل بدون سنسور، موقعیت روتور از طریق اندازهگیری و تحلیل ولتاژ برگشتی (Back-EMF) تعیین میشود. این نوع موتورها معمولاً سادهتر و اقتصادیتر هستند.
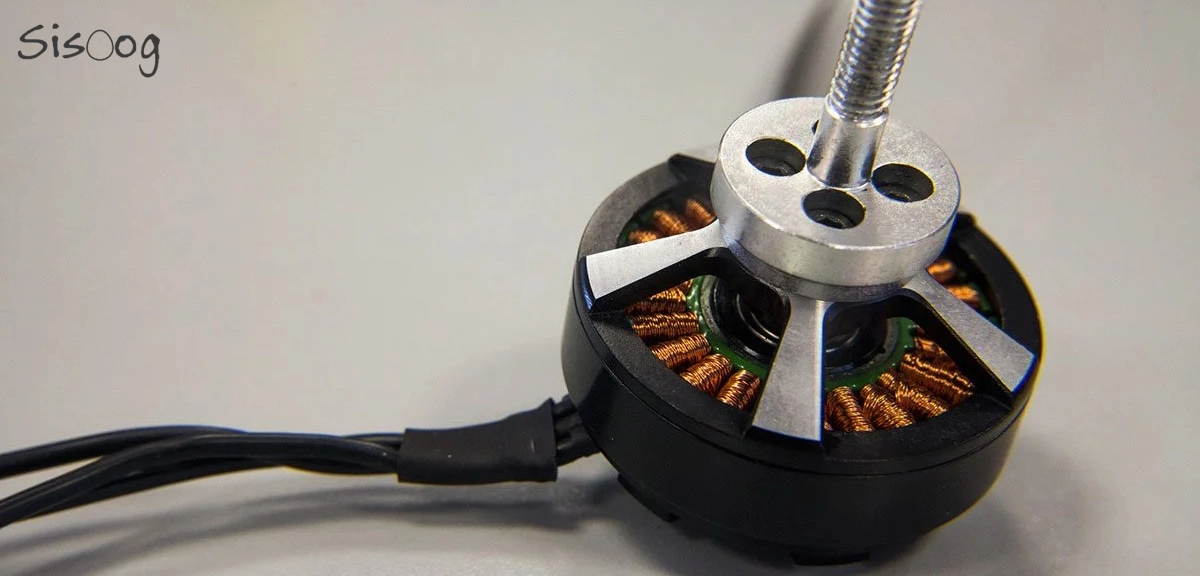
ساختمان داخلی موتورهای BLDC
- استاتور

شامل سیمپیچهایی است که در شیارهای هسته آهنی قرار گرفتهاند و با عبور جریان کنترلشده از این سیمپیچها، میدان مغناطیسی چرخان ایجاد میشود.
این سیمپیچها معمولاً بهصورت ستارهای در داخل موتور به یکدیگر متصل شدهاند.
- روتور

متشکل از آهنرباهای دائمی (معمولاً نئودیمیوم) است که میدان مغناطیسی دائمی تولید میکنند.
روتور با واکنش به میدان مغناطیسی استاتور شروع به چرخش میکند.
در مدلهای سنسوردار، حسگرهای اثر هال نیز در نزدیکی روتور قرار دارند تا موقعیت دقیق آن را اندازهگیری کنند.

عکس فوق یک موتور BLDC قرار گرفته در CD ROM را نشان میدهد که جهت تعیین موقعیت شفت موتور از سنسور اثر هال استفاده شده است.
موتور براسلش چطور حرکت میکند؟

برای درک بهتر عملکرد داخلی یک موتور براشلس سه فاز، به شکل بالا نگاه میکنیم. میدانیم که موتور دارای مضربی از ۳ سیمپیچ است. سیمپیچها به طور مساوی در اطراف محیط موتور قرار گرفتهاند، بنابراین زاویه بین هر سیمپیچ برابر است با 360∘360^\circ360∘ تقسیم بر تعداد سیمپیچها.
برای مثال، در اینجا موتور دارای ۱۲ سیمپیچ است که ۴ سیمپیچ برای هر یک از ۳ ورودی در نظر گرفته شده است (هر ۴ سیمپیچ با هم بهصورت سری متصل شدهاند).
مقابل هر سیمپیچ، آهنربای معادل آن بر روی روتور قرار دارد. میدانیم که با اعمال جریان به سیمپیچها، یک میدان مغناطیسی ایجاد میشود که جهت آن بسته به جهت جریان تغییر میکند. با تغییر جهت جریان از طریق سیمپیچها، قطب میدان الکترومغناطیسی را بهگونهای تغییر میدهیم که قطبهای مخالفی بین سیمپیچها و آهنرباها ایجاد شود.
برای مثال، در تصویر بالا و در حالت C-A، ولتاژی به سیمپیچهای “C” و “A” اعمال میشود. این کار جریانی از “C” به “A” عبور میدهد و میدان مغناطیسیای در این دو سیمپیچ ایجاد میکند. این میدان با میدان آهنربا مخالف است و نیرویی تولید میکند که شفت را به اندازه 36012\frac{360}{12}12360 درجه به جلو میبرد.
در لحظهای که سیمپیچها از مقابل یکدیگر عبور میکنند، آهنربای بعدی باید وارد حالت بعدی شود؛ بنابراین، باید جریان را از “A” به “B” عبور دهیم. به همین ترتیب، یک حلقه بینهایت ایجاد میشود که هر ۶ حالت تکرار میگردد.
تنها مشکلی که باقی میماند، این است که چه زمانی باید جهت جریان (کوموتاسیون) را تغییر دهیم.
موتورهای سنسوردار و بدون سنسور
- در موتورهای سنسوردار، این مشکل بهراحتی قابلحل است؛ کافی است موقعیت روتور را با استفاده از سنسورهای اثر هال بخوانیم. هر زمان که موقعیت شفت تغییر کرد، کوموتاسیون را انجام میدهیم.
- در موتورهای بدون سنسور، اوضاع کمی پیچیدهتر است.
یکی از روشهای مرسوم برای کنترل موتورهای بدون سنسور در سرعتهای بالا، استفاده از ولتاژ Back-EMF است.
Back-EMF یا BEMF چیست و چگونه به تشخیص موقعیت شفت موتور کمک میکند؟

میدانیم که آهنربا میدان مغناطیسی در اطراف خود ایجاد میکند. هنگامی که یک سیمپیچ را در مقابل او قرار میدهید، حرکت جریان میدان را از طریق سیمپیچ تغییر میدهد و جریانی را از طریق سیمپیچها ایجاد میکند. با عبور میدان بیشتر از سیمپیچ، شدتجریان بالاتری از سیمپیچ عبور میکند و ولتاژ بیشتری میتواند روی خروجیها قرار بگیرد:

در شکل بالا مشاهده میکنیم که سیمپیچ بالایی A و B فعال شدهاند و یک جریان از سیمپیچهای A به B در جهت فلشهای خاکستری ایجاد میکند. این جریان یک میدان مغناطیسی برابر در سیمپیچهای A و B ایجاد میکند. آن میدان مغناطیسی، میدان مغناطیسی مخالف آهنرباهای بیرونی است که در نتیجه باعث حرکت موتور به سمت جلو میشود. در این مثال رنگ قرمز آهنرباها S و آبی را N مینامیم. ما فلشهای آبی را مشاهده میکنیم که میدان مغناطیسی از آهنربای آبی خارج میشوند. بیایید فعلاً به سیمپیچ C نگاه کنیم. آن خطوط میدانی هنوز از سیمپیچ C عبور نکردهاند. میبینیم که تقریباً تمام خطوط میدان خارج از سیمپیچ هستند، اما در شکل بعدی، چند لحظه بعد میبینیم که چند خط از سیمپیچ عبور میکنند. بهاینترتیب جریان ایجاد شده تحتتأثیر چرخش موتور در سیمپیچ C القا میشود. این یک تغییر ولتاژ VC-FB را به ما میدهد که میتوانیم با ADC میکروکنترلر خود اندازهگیری کنیم.

در شکل بعدی مشاهده میکنیم که خطوط میدان کاملاً از سیمپیچ C عبور میکنند. این بدان معنی است که جریان میدان حداکثر است و جریان فعلی در سیمپیچ C نیز همینطور است. این دقیقاً همان لحظهای است که باید به مرحله بعدی دنباله خود تغییر دهیم (کوموتاسیون انجام شود). اگر بتوانیم دقیقاً این لحظه را با میکروکنترلر خود تشخیص دهیم، میتوانیم در لحظه مناسب به قسمت بعدی دنباله خود بپریم. پس در نتیجه ما یک ولتاژ در سیمپیچ غیرفعال داریم که به حرکت موتور بستگی دارد. ما میتوانیم آن ولتاژ را با استفاده از ADC خود اندازهگیری کنیم و آن را با میانگین ولتاژ هر 3 سیمپیچ مقایسه کنیم. وقتی حداکثر ولتاژ را تشخیص دادیم، میتوانیم توالی (کوموتاسیون) را تغییر دهیم.

طراحی سختافزار
برای طراحی یک درایور موتور براشلس (BLDC Motor) به مجموعهای از قطعات و ملاحظات سختافزاری نیاز داریم. این قطعات و ملاحظات باید امکان کنترل دقیق، بازده بالا، و قابلیت اطمینان را فراهم کنند. در ادامه، اجزای اصلی و نیازمندیهای سختافزاری برای طراحی چنین درایوری توضیح داده میشود:
۱. منبع تغذیه (Power Supply)
ما در اینجا از MP2307 استفاده میکنیم که دارای حداکثر جریان خروجی 3 آمپر و حداکثر ولتاژ ورودی 23 ولت می باشد.وظیفه این رگولاتور ساخت ولتاژ 5 ولت برای تغذیه ی قسمت های مختلف دستگاه می باشد.
۲. میکروکنترلر:
اصلیترین بخش دستگاه همین کنترلر میباشد که وظیفه ی تولید سیگنالهای PWM پردازش سیگنال Back-emf و… را دارد.
یکی از راههای اندازه back-emf استفاده از مقایسهکنندههای آنالوگ میباشد، به همین جهت برای کنترلر دستگاه از یک میکروکنترلر ATMEGA328PU استفاده شده که دارای یک مقایسهکننده داخلی میباشد و بهراحتی میتونیم وظیفه تشخیص زمان کوموتاسیون رو به این میکرو بسپاریم.
۳. سوئیچهای قدرت (Power Switches)
سوئیچهای قدرت بسته به جریان نامی موتور هم میتواند از نوع IGBT استفاده شود و هم از Mosfet. ولی برای انتخاب آنها حتماً باید پارامترهای ولتاژ کاری، جریان کاری و Rds(on) رو در نظر بگیرید.
۴. درایور گیت (Gate Driver)
درایورهای گیت یکی از اصلیترین وظایف را بر عهده دارند، وظیفه سوئیچکردن ترانزیستورهای قدرت با حداکثر راندمان و کمترین تلفات.
گزینههای مختلفی برای این قسمت هست از جمله سری DRV از شرکت TI و… ولی یکی از محبوبترین این درایورها سری IR هستند که هم قیمت معقولی دارند و هم کارآمدتر هستند. برای این مدار از IR2101 استفاده میکنیم.
۵. مدار فیدبک
جهت فیدبک گرفتن ولتاژ موتور برای تشخیص back-EMF از مدار زیر استفاده میکنیم:

شمای کلی شماتیک ما

- به دلیل اینکه برنامه با Arduino نوشته شده بر روی برد از یک چیپ ch340c برای پروگرام کردن میکرو استفاده شده.
همچنین برای ستکردن سرعت از ورودی PWM (با خواندن دیوتیسایکل) استفاده شده است.
نرمافزار
مراحل راهاندازی موتور براشلس بدون سنسور
- شروع حرکت (Startup)
در سرعتهای پایین، نیروی Back-EMF بسیار کم است و نمیتوان از آن برای کنترل موتور استفاده کرد؛ بنابراین، بالجبار از روش startup استفاده میکنیم:
- الگوریتم شروع اولیه (Open-loop Startup):
- استاتور با الگوی کموتاسیون ثابت و زمانبندی مشخص تحریک میشود تا روتور حرکت کند.
- در این حالت، موتور بهصورت “بدون بازخورد” (بدون خوانش BEMF)کار میکند و تلاش میشود تا روتور بهسرعت کافی برسد.
- تشخیص Back-EMF
زمانی که موتور به حداقل سرعت مشخصی میرسد، ولتاژ Back-EMF در سیمپیچها القا میشود. این ولتاژ اندازهگیری میشود تا موقعیت روتور تعیین گردد.
- سوییچ به کنترل Close-loop
پس از تشخیص Back-EMF، کنترلکننده از حالت Open-loop به حالت Close-loop تغییر میکند:
- با استفاده از الگوریتمهایی مانند مدولاسیون عرض پالس (PWM)، سیگنالهای مناسب برای درایو موتور تولید میشود.
- موقعیت و سرعت روتور به طور مداوم تخمین زده شده و موتور با دقت بالا کنترل میشود.
توضیحات برنامه
حلقه ابتدایی برنامه تابع setup میباشد که به جهت کانفیگ میکرو استفاده شده:
در تابع setup یک شرط جهت ورود به حالت کانفیگ نیز وجود دارد، در صورت اینکه PWM ورودی از 50% خود بیشتر باشد دستگاه به مد کانفیگ رفته و مقادیر ابتدا و انتهای PWM را مجددا کانفیگ و در حافظه ی خود ذخیره میکند.
همچنین از توابع beep_1KHZ, beep_2KHZ, beep_3KHZ برای ایجاد صدایی شبیه بیزر در موتور استفاده شده که اخطارهایی را به کاربر اعلام کند.
تابع loop
این تابع دائماً در میکرو در حال اجرا میباشد، در صورت اینکه PWM ورودی از حد مشخصی بیشتر شود فلگ MOTOR_SPINNING به معنی شروع کار موتور true میشود.
با یک شدن این فلگ برنامه در حلقه Motor start میرود و حلقه startup که در اول همین مقاله گفته شد را اجرا میکند (بدون درنظرگرفتن BEMF اقدام به چرخاندن موتور میکند)
پس از پایان این حلقه، میکرو توسط دستور ACSR |= 0x08 وقفه مقایسهکننده آنالوگ را روشن تا از BEMFها شروع به استفاده کند.
در صورت اینکه سرعت موتور به حد مطلوبی رسیده باشد و میکرو قادر به تشخیص BEMFها باشد موتور به حرکت خود ادامه میدهد.
حلقه بعدی نیز تا زمانی که دستور خاموشی از PWM ورودی اعمال نشود وظیفه کنترل دور موتور را بسته به PWM ورودی دارد.
منبع: electronoobs.com



وبسایت: http://typhoonic.ir
.:: علاقهمند به حوزهی سختافزار و طراحی و توسعهی درایوهای موتورهای براشلس (BLDC) و موتورهای AC ::.
مقالات بیشتر

پالت | بازار خرید و فروش قطعات الکترونیک
قطعات اضافه و بدون استفاده همیشه یکی از سربارههای شرکتها و طراحان حوزه برق و الکترونیک بوده و هست. پالت سامانهای است که بصورت تخصصی اجازه خرید و فروش قطعات مازاد الکترونیک را فراهم میکند. فروش در پالت
آیسی | موتور جستجوی قطعات الکترونیک
سامانه آی سی سیسوگ (Isee) قابلیتی جدید و کاربردی از سیسوگ است. در این سامانه سعی شده است که جستجو، انتخاب و خرید مناسب تر قطعات برای کاربران تسهیل شود. جستجو در آیسی
سیسوگشاپ | فروشگاه محصولات Quectel
فروشگاه سیسوگ مجموعه ای متمرکز بر تکنولوژی های مبتنی بر IOT و ماژول های M2M نظیر GSM، GPS، LTE، NB-IOT، WiFi، BT و ... جایی که با تعامل فنی و سازنده، بهترین راهکارها انتخاب می شوند. برو به فروشگاه سیسوگ
سیسوگ فروم | محلی برای پاسخ پرسشهای شما
دغدغه همیشگی فعالان تخصصی هر حوزه وجود بستری برای گفتگو و پرسش و پاسخ است. سیسوگ فروم یک انجمن آنلاین است که بصورت تخصصی امکان بحث، گفتگو و پرسش و پاسخ در حوزه الکترونیک را فراهم میکند. پرسش در سیسوگ فرم
سیکار | اولین مرجع متن باز ECU در ایران
بررسی و ارائه اطلاعات مربوط به ECU (واحد کنترل الکترونیکی) و نرمافزارهای متن باز مرتبط با آن برو به سیکار







سیسوگ با افتخار فضایی برای اشتراک گذاری دانش شماست. برای ما مقاله بنویسید.