توصیه شده


شروع ماجراجویی با RTL‑SDR در این قسمت از مجموعه آموزشهای RTL‑SDR، پارسا از پایهترین مفاهیم...
خانواده سیسوگ







پلتفرم آردوینو: روح آردوینو در کالبدهای دیگر قسمت اول | همراه با راهاندازی OLED و سنسور دما DS18B20
۱۴۰۴-۰۷-۱۴
9 دقیقه
در این آموزش ابتدا نحوه ی راهاندازی سنسور DS18B20 و نمایشگر OLED را بررسی میکنیم....








در دنیای امروز، اینترنت اشیا (IoT) به یکی از مهمترین شاخههای فناوری تبدیل شده که...




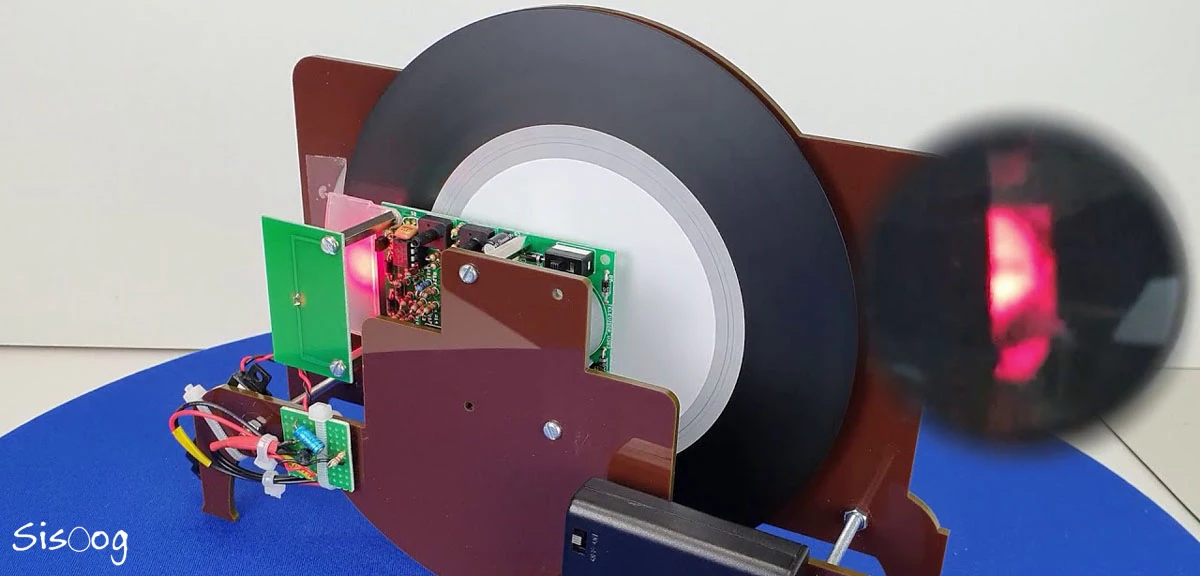
صفحه نیپکو چیه؟ دیسک یا صفحه Nipkow یا صفحه اسکن، اختراع Paul Gottlieb Nipkow، یک...


در حال بارگذاری...