پروتکل LIN شبکه ارتباطی ارزان و کارآمد در خودروها
قسمت 1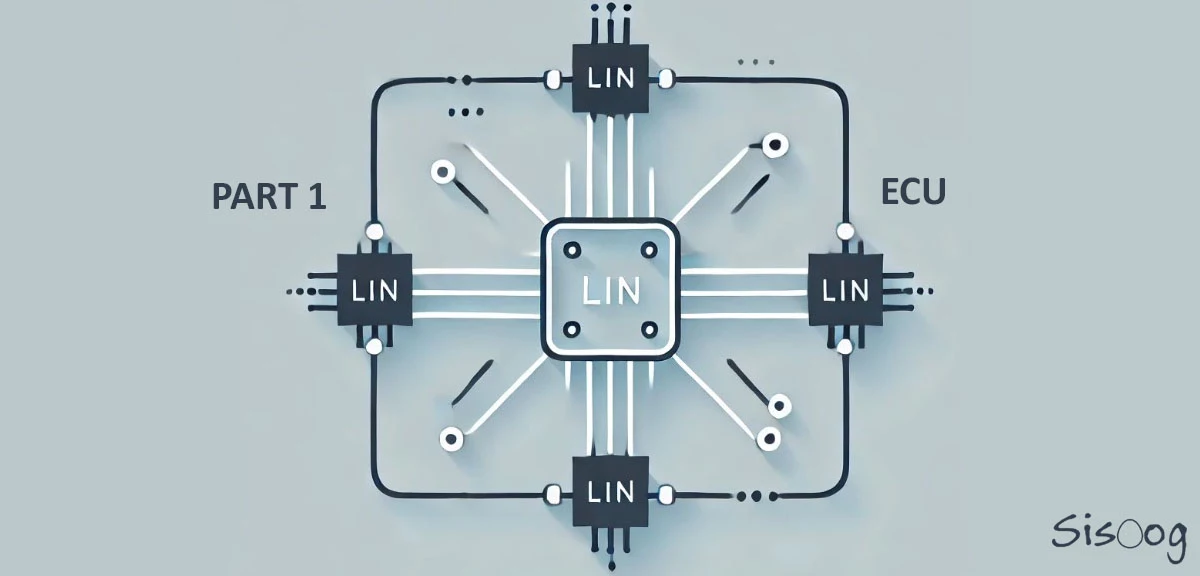
پروتکل LIN یک پروتکل ارزانقیمت با کارایی مطلوب که سیستمهای ساده را مدنظر قرار داده است. این پروتکل بین نودهایی که ارتباط بین آنها نیاز بهسرعت بالایی ندارد ارتباط برقرار میکند.
تاریخچه پروتکل LIN
LIN مخفف Local Interconnect Network است. زمانی که خودروسازها شروع به افزودن ویژگیهای متنوع (با افزایش سنسورها) به خودرو کردند، هزینه تمام شده خودرو افزایش پیدا کرد؛ بنابراین برای ساخت یک وسیله نقلیه با هزینه کم، پنج خودروساز BMW، Volkswagen Group، Audi Group، Volvo Cars و Mercedes-Benz پروتکل LIN را در سال 1990 توسط Volcano Automotive Group و Motorola توسعه دادند. اولین نسخه LIN(نسخه 1.0) برای استفاده در خودرو پایدار نبود. سپس نسخه LIN-1.3 که قابلاستفاده در خودرو بود در نوامبر 2002 منتشر شد. در سپتامبر 2003، نسخه LIN-3.0 با ویژگیهای بیشتر و دارای قابلیت خطایابی معرفی شد. حداقل مزیت خوبLIN این است که میتواند بهعنوان خط برق DC برای وسایل نقلیه خودرو استفاده شود و بهعنوان ISO/AWI 17987-8 استاندارد شده است.
جدول 1- تاریخچه نسخههای پروتکل LIN
|
نسخه |
تاریخ انتشار |
توضیحات |
|
LIN 1.0 |
1999-07-01 |
نسخه اولیه LIN |
|
LIN 1.1 |
2000-03-06 |
|
|
LIN 1.2 |
2000-11-17 |
|
|
LIN 1.3 |
2002-12-13 |
|
|
LIN 2.0 |
2003-09-16 |
تجدیدنظر عمده |
|
LIN 2.1 |
2006-11-24 |
توضیحات، پیکربندی اصلاح شده، لایه انتقال افزایشیافته و تشخیص اضافه شده است. |
|
LIN 2.2 |
2010-12-31 |
سند به روز شده مطابق با LIN 2.1 Errata sheet 1.4 |
|
LIN 2.2A |
2010-12-31 |
تصحیح الگوی بیداری سازی |
مقدمهای بر پروتکل LIN
LIN یک پروتکل کاربردی سازگار با CAN و SAE-J1850 است. این پروتکل کارایی و قابلیت اطمینان کمتری نسبت به پروتکل CAN دارد؛ اما ارزانتر است.
تعریف پروتکل LIN
پروتکل ارتباطی LIN یک پروتکل با قابلیت Broadcasting بوده، فقط یک Master دارد ولی چندین Slave (حداکثر تا 16) میتواند داشته باشد، ارتباط سریال مبتنی بر SCI/UART، پروتکل ارتباطی بایت گرا، با راه اندازی زمان، طراحی شده برای پشتیبانی از شبکه های خودرو در ارتباط با Controller Area Network (CAN)، که این امکان را فراهم می کند ارتباط مقرون به صرفه با سنسورها و محرک ها زمانی که تمام ویژگی های CAN مورد نیاز نیست. از ویژگی های اصلی این پروتکل (در مقایسه با CAN) هزینه کم و سرعت کم و استفاده برای شبکه های کوتاه مدت می باشد.
معمولاً از پروتکل LIN در وسایل نقلیه برای اتصال سنسورها و عملگرها به یک ECU استفاده میشود که اغلب توسط یک دروازه (Gateway) به CANBus متصل میشود. در پروتکل LIN قابلیت تشخیص تصادم وجود ندارد، بنابراین در LIN، تمام پیامها فقط توسط Master آغاز میشوند و حداکثر یک slave پیام ارسال شده را پاسخ میدهد. Master معمولاً یک میکروکنترلر نسبتاً قدرتمند است، درحالیکه Slaveها میتوانند میکروکنترلرهای ارزانتر، یا ASIC اختصاصی و غیره باشند. ویژگی اصلی شبکه LIN مکانیزم همگامسازی آن است که امکان همگامسازی گرههای Slave را بدون استفاده از نوسانسازیها را فراهم میکند. فقط Master دارای نوسانساز است. همانند پروتکلCAN، برای اضافهکردن یک Slave دیگر به شبکه LIN نیازی به تغییر سختافزار یا نرمافزار سایر گرههای Slave در شبکه LIN نیست.

شکل 1- شبکه LIN با ارتباط Mater و Slave
ویژگیهای پروتکل LIN
- یک گره LIN دارای یک Master و چندین Salve (حداکثر 16تا) است.
- ارتباط تک سیمه
- سرعت 1 تا 20 کیلوبیت بر ثانیه و جداکثر تا طول 40 متر.
- زمان تأخیر تضمین شده برای انتقال داده در آن در نظر گرفته شده است تا پاسخهای قابلاعتماد و قابلپیشبینی در شبکه دریافت شود.
- طول داده متغیر (2، 4 یا 8 بایت)
- پیکربندی انعطافپذیر برای Salveها.
- دارای قابلیت دریافت Multicast با هماهنگسازی زمان بدون کریستال یا تشدیدکننده سرامیکی است.
- قابلیت تشخیص گرههای معیوب در شبکه را دارد.
- پشتیبانی از تشخیص خطا، چکسام
- سختافزار ساده و کمهزینه با قابلیت پیادهسازی توسط استاندارد SCI/UART .
کاربردهای پروتکل LIN
شبکه LIN کاربردهای زیادی در وسایل نقلیه خودرو دارد که عبارتاند از:
قسمت سقف: سنسور باران، حسگر روشنایی، کنترل روشنایی، سانروف
درب/پنجره: آینه، کنترل پنجره، قفل در
فرمان: کروز کنترل، رادیو، تلفن همراه، برف پاکن، چراغها
صندلیها: کنترل موقعیت صندلی، سنسور اشغال، کنترل گرمایش (در صورت نصب).
علاوه بر خودرو LIN در سایر صنایع مانند لوازمخانگی (لباسشویی، یخچال، اجاقگاز) و اتوماسیون صنعتی (تجهیزات ساخت و ماشینآلات فلزی) کاربرد دارد.
مانند پروتکل CAN، LIN نیز دارای LIN Controller و فرستنده و گیرنده LIN است. کنترلر LIN بیشتر از استاندارد SCI موجود در میکروکنترلر استفاده میکند یا میتوانیم از UART موجود در میکروکنترلر استفاده کرده و قالب استاندارد LIN ایجاد کنیم.
لایه فیزیکی پروتکل LIN
مشخصات LIN بهگونهای طراحی شده است که امکان استفاده از نودهای سختافزاری بسیار ارزان را در یک شبکه فراهم کند. پروتکل LIN یک شبکه کمهزینه و تک سیم بر اساس ISO 9141 است. در توپولوژیهای شبکه مالتی پلکس خودروهای امروزی، از میکروکنترلرهایی با قابلیت UART یا سختافزار اختصاصی LIN استفاده میشود. میکروکنترلر تمام دادههای LIN موردنیاز (پروتکل …) را (تا حدی) توسط نرمافزار تولید میکند و از طریق یک فرستنده – گیرنده LIN (به زبان ساده، یک تغییردهنده سطح با برخی افزودنیها) به شبکه LIN متصل میشود.
فرستنده گیرنده LINBus یک نسخه اصلاح شده از فرستنده گیرنده LIN است که توسط استاندارد
ISO-9141 استفاده میشود. فرستنده/گیرنده ارتباط بین باس و شبکه را تسهیل میکند. فرستنده و گیرنده LIN سطح ولتاژ میکروکنترلر را به سطوح ولتاژ استاندارد LIN (بالاتر) تبدیل میکند و بالعکس؛ بنابراین کنترلکننده LIN نگران ارتباط فیزیکی نیست. اساساً فرستنده/گیرنده LIN دادهها را از پایه UART میکروکنترلر دریافت میکند (کنترلر LINداخل میکروکنترلر تعبیه شده) و سطح ولتاژ آنها را به سطح ولتاژ استاندارد LIN تبدیل میکند. RxD گذرگاه را مانیتور میکند و پیامهای روی گذرگاه LIN را به سطوح ولتاژ میکروکنترلر تبدیل میکند. سطوح ولتاژ متعارف برای TxD و RxD برای اکثر سطوح میکروکنترلر 3.3 ولت و 5 ولت است. باس LIN و فرستنده گیرندههای LIN، معمولاً در ولتاژهایی از 9 ولت تا 18 ولت کار میکنند، اما برخی از آنها تا 30 ولت میروند. بسته به کاربرد؛ یک وسیله نقلیه معمولی یک سیستم باتری 12 ولتی است، اما برخی از وسایل نقلیه بزرگتر تا 24 ولت افزایش مییابند.

طراحی لایه فیزیکی LIN
مقاومت Pull-Up در پروتکل LIN
گره Master به یک مقاومت بالاکشنده و دیود مطابق با مشخصات LIN نیاز دارد. مقدار متعارف مقاومت 1 کیلو اهم است (600 Ω و 500 Ω هم میشود استفاده کرد. دیود برای حفاظت بکار برده میشود. مقدار متعارف مقاومت بالاکشنده در گره Salve برای LIN، 30 کیلواهم است و در همه فرستندههای LIN مدرن، این مقدار در داخل IC تعبیه شده و بنابراین نیازی به مقاومت بالاکشنده خارجی نیست.
سطح ولتاژ آستانه LIN BUS
فرستنده و گیرنده LIN دارای سطوح ولتاژ مختلفی هستند تا الزامات سطح ولتاژ مغلوب و غالب را برآورده کنند. برای پالسهای غالب (کم)، فرستنده باید سطح ولتاژ را به زیر 0.2VBAT بیاورد، درحالیکه گیرنده سطح ولتاژ زیر 0.4VBAT را بهعنوان بیت غالب تفسیر میکند. برای پالسهای مغلوب (بالا)، فرستنده باید سطح ولتاژ را بالای 0.8VBAT بیاورد، درحالیکه گیرنده سطح ولتاژ بالای 0.6VBAT را بهعنوان بیت مغلوب تفسیر میکند. تفاوت سطوح بین گیرنده و فرستنده به دلیل تفاوت در ولتاژ منبع تغذیه خارجی و ولتاژ باس LIN واقعی است. افت ولتاژی که ممکن است در کابلکشی اتفاق بیفتد، جابهجایی سطح ولتاژ زمین، یا فقط تغییرات ناشی از فیلترکردن اجزا در امتداد باس، دلایل انحراف منبع خارجی در مقابل سطح باس هستند.

سطح آستانه اتوبوس LIN
ارتباط داده پروتکل LIN
همانطور که بیان شده پروتکل LIN یک پروتکل ارتباطی master-slave است که دارای یک Master و چندین Slave (حداکثر 16) است. بنابراین همیشه master ارتباط را آغاز کرده و Slave به master طبق قواعد خاص LIN واکنش یا پاسخ میدهد. به دلیل اینکه Master باس LIN را به طور کامل کنترل میکند بنابراین تصادم داده هیچ وقت اتفاق نمیافتد و نیازی به تشخیص آن نیست. در حالیکه در CAN وجود دارد. برای تبادل داده، Master یک هدر را روی باس ارسال میکند. Slave مدنظر یک پاسخ با حداکثر طول 8 بایت را در جواب ارسال میکند (شکل 2).

شکل 2- فریم تبادل داده در LIN
فرمت داده در پروتکل LIN
فرمت داده در پروتکل LIN شامل دو بخش کلی است: هدر و پاسخ. البته بین هر کدام از این دو بخش و در خود بخشها هم ممکن است یک فضای زمانی IFS وجود داشته باشد. پیامهای مختلف بر اساس ویژگیهایشان در فایل توصیفی Lin (LDF) ……..بردها با یک قاب داده که شامل 2، 4 و 8 بایت داده به اضافه 3 بایت اطلاعات کنترلی است، پاسخ میدهند.

شکل 3- فرمت بخش هدر
هدر
هدر پیام LIN توسط گره Master در LIN تولید میشود که شامل موارد زیر است:
- Break
- Sync
- شناسه محافظت شده PID
- فضای بین بایت.
- فضای پاسخگویی





پالت | بازار خرید و فروش قطعات الکترونیک
قطعات اضافه و بدون استفاده همیشه یکی از سربارههای شرکتها و طراحان حوزه برق و الکترونیک بوده و هست. پالت سامانهای است که بصورت تخصصی اجازه خرید و فروش قطعات مازاد الکترونیک را فراهم میکند. فروش در پالت
آیسی | موتور جستجوی قطعات الکترونیک
سامانه آی سی سیسوگ (Isee) قابلیتی جدید و کاربردی از سیسوگ است. در این سامانه سعی شده است که جستجو، انتخاب و خرید مناسب تر قطعات برای کاربران تسهیل شود. جستجو در آیسی
سیسوگشاپ | فروشگاه محصولات Quectel
فروشگاه سیسوگ مجموعه ای متمرکز بر تکنولوژی های مبتنی بر IOT و ماژول های M2M نظیر GSM، GPS، LTE، NB-IOT، WiFi، BT و ... جایی که با تعامل فنی و سازنده، بهترین راهکارها انتخاب می شوند. برو به فروشگاه سیسوگ
سیسوگ فروم | محلی برای پاسخ پرسشهای شما
دغدغه همیشگی فعالان تخصصی هر حوزه وجود بستری برای گفتگو و پرسش و پاسخ است. سیسوگ فروم یک انجمن آنلاین است که بصورت تخصصی امکان بحث، گفتگو و پرسش و پاسخ در حوزه الکترونیک را فراهم میکند. پرسش در سیسوگ فرم
سیکار | اولین مرجع متن باز ECU در ایران
بررسی و ارائه اطلاعات مربوط به ECU (واحد کنترل الکترونیکی) و نرمافزارهای متن باز مرتبط با آن برو به سیکار







سیسوگ با افتخار فضایی برای اشتراک گذاری دانش شماست. برای ما مقاله بنویسید.