الگوریتم جدید هوش مصنوعی برای نگهداری اشیای شکننده توسط رباتها بدون افزایش فشار
به گفته hackster
یکی از ظریفترین مهارتهایی که ما انسانها تقریبا به شکل غریزی انجام میدهیم، گرفتن و نگه داشتن اشیایی است که بهراحتی میتوانند از دست رها شوند یا در اثر فشار زیاد آسیب ببینند. ما هنگام حمل یک لیوان آب یا یک گلدان سفالی نه آن را بیش از حد میفشاریم و نه به آن فرصت میدهیم که از انگشتانمان سر بخورد. این توانایی حاصل میلیونها سال تکامل و عملکرد هماهنگ حواس، اعصاب و عضلات ماست. اما در دنیای رباتها، تکرار همین کار بهطرزی باور نکردنی چالشبرانگیز بوده است.
اخیرا تیمی از پژوهشگران دانشگاه لینکلن در بریتانیا، با الهام از نحوه پیشبینی حرکات توسط مغز انسان، موفق به توسعه یک الگوریتم نوین شدهاند که به رباتها اجازه میدهد بدون نیاز به افزایش فشار، اشیاء شکننده را بهطور پایدار در دست خود نگه دارند. این موفقیت میتواند مسیر را برای پیشرفت چشمگیر در حوزه اتوماسیون صنعتی، جراحی رباتیک و حتی کاربردهای خانگی هموار کند.

مسئله
رباتها، حتی پیشرفتهترین آنها، برای جلوگیری از رها شدن یک شیء اغلب تنها یک راه حل دارند: افزایش نیروی گرفتن. این رویکرد ممکن است برای قطعات فلزی یا ابزارهای سنگین بیخطر باشد، اما برای اشیای ظریف مثل تخممرغ، گل، یا قطعات شیشهای، برابر است با شکست پروژه. در نتیجه، نبود یک سیستم کنترلی هوشمند که لغزش را پیشبینی و اصلاح کند، مانعی جدی برای ورود رباتها به بعضی فعالیتهای حساس بوده است.
راهکار: الگوریتم «مدل پیشرو»
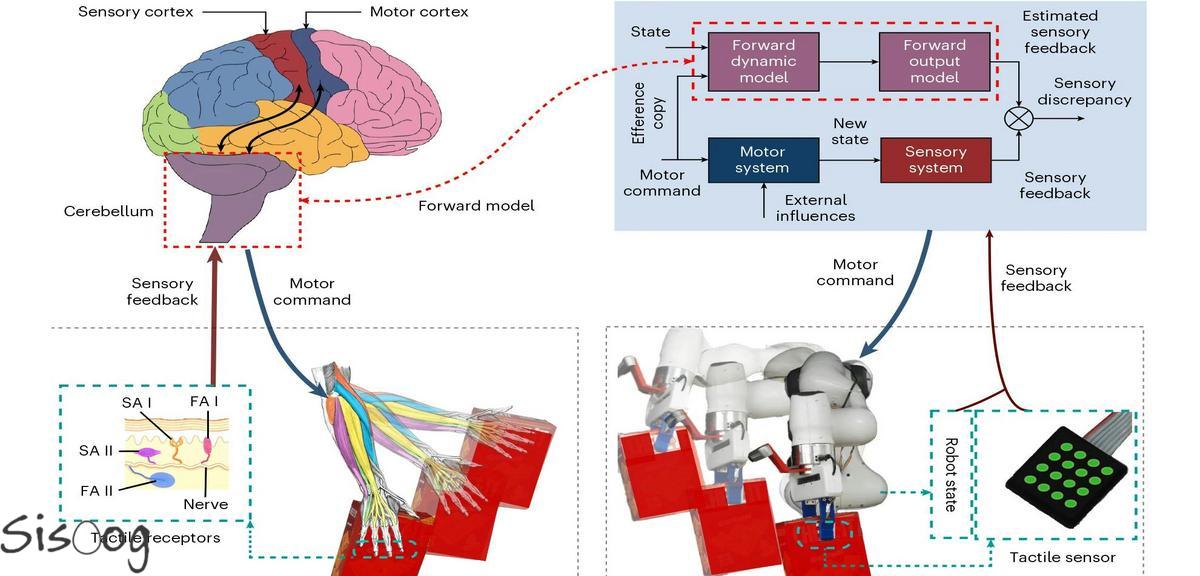
پژوهشگران لینکلن با الهام از «مدلهای پیشرو» در مغز انسان، الگوریتمی طراحی کردهاند که قادر است وضعیت شیء را پیش از وقوع لغزش پیشبینی کند. این مدل بر پایه استفاده همزمان از دادههای بهدستآمده از حسگرهای لامسه و تحلیل حرکتی بازو عمل میکند.
بخشهای کلیدی سیستم:
- حسگرهای لامسه: جمعآوری دادههای دقیق از فشار و تماس بین سطح ربات و شیء.
- مدل پیشبینی حرکتی: شبیهسازی حرکات بعدی بازو و ارزیابی احتمال لغزش پیش از وقوع.
- کنترل تطبیقی: اصلاح لحظهای مسیر حرکت یا نحوه گرفتن بدون تغییر فشار پایهای.
نتیجهی این فرآیند، شکلی از «هوش فیزیکی» در ربات است که آن را به شرایط لحظهای محیط حساس میکند.
آزمایشها و سختافزار
برای آزمایش عملی این روش، پژوهشگران از بازوی رباتیک Franka Emika استفاده کردند — یک بازوی صنعتی معروف به دقت و عملکرد نرم. این بازو مجهز به حسگرهای لامسه فوقالعاده دقیق شده و الگوریتم جدید روی سیستم کنترل آن پیاده شد. آزمایشها نشان داد که حتی زمانی که شیء تحت نیروهای خارجی قرار میگیرد (مثلاً حرکت ناگهانی یا تغییر جهت)، ربات میتواند با تعدیل مسیر خود، از سقوط یا خرد شدن شیء جلوگیری کند.
نتایج و کارایی
- کارایی بالا: اشیاء شکننده بدون نیاز به افزایش فشار محکم نگه داشته شدند.
- واکنش سریع: سیستم میتواند در بازه بسیار کوتاه پیش از لغزش، پاسخ مناسب ارائه دهد.
- عملکرد پایدار در شرایط واقعی: حتی با متغیر شدن حرکت یا نیروهای محیطی.
محدودیتها و چالشهای آینده
البته مسیر هنوز تمام نشده است. تیم تحقیقاتی مشغول کار بر روی:
- بهبود سرعت پردازش برای کاربردهای زمان-واقعی (Real-Time).
- گسترش توانایی برای دستکاری دو دستی و اشیای تغییر شکلپذیر.
- ادغام دادههای بصری (بینایی ماشین) با لمسی برای دقت و تصمیمگیری بهتر.
این ارتقاها میتواند باعث شود که ربات در کارهایی مانند بستهبندی اشیاء حساس، جراحیهای پیچیده یا حتی کمک در خانههای هوشمند، به مهارتهای انسانی نزدیکتر شود.
اهمیت و چشمانداز
هوش مصنوعی در حال حاضر در سطح پردازش داده، مکالمه و بینایی عملکرد فوقالعادهای دارد، اما مهارتهای حرکتی دقیق هنوز چالش برانگیزند. این تحقیق نشان میدهد که با ترکیب درست حسگرها و الگوریتمهای پیشبینی، میتوان مرز بین طبیعت زیستی و ماشین را کوچکتر کرد.
در آینده، چنین رباتهایی میتوانند در کارخانهها مسئول بستهبندی ظروف شیشهای، در بیمارستانها دستیار جراح باشند، یا در خانه بدون ترس از شکستن لیوان، پذیرایی کنند.







پالت | بازار خرید و فروش قطعات الکترونیک
قطعات اضافه و بدون استفاده همیشه یکی از سربارههای شرکتها و طراحان حوزه برق و الکترونیک بوده و هست. پالت سامانهای است که بصورت تخصصی اجازه خرید و فروش قطعات مازاد الکترونیک را فراهم میکند. فروش در پالت
آیسی | موتور جستجوی قطعات الکترونیک
سامانه آی سی سیسوگ (Isee) قابلیتی جدید و کاربردی از سیسوگ است. در این سامانه سعی شده است که جستجو، انتخاب و خرید مناسب تر قطعات برای کاربران تسهیل شود. جستجو در آیسی
سیسوگشاپ | فروشگاه محصولات Quectel
فروشگاه سیسوگ مجموعه ای متمرکز بر تکنولوژی های مبتنی بر IOT و ماژول های M2M نظیر GSM، GPS، LTE، NB-IOT، WiFi، BT و ... جایی که با تعامل فنی و سازنده، بهترین راهکارها انتخاب می شوند. برو به فروشگاه سیسوگ
سیسوگ فروم | محلی برای پاسخ پرسشهای شما
دغدغه همیشگی فعالان تخصصی هر حوزه وجود بستری برای گفتگو و پرسش و پاسخ است. سیسوگ فروم یک انجمن آنلاین است که بصورت تخصصی امکان بحث، گفتگو و پرسش و پاسخ در حوزه الکترونیک را فراهم میکند. پرسش در سیسوگ فرم
سیکار | اولین مرجع متن باز ECU در ایران
بررسی و ارائه اطلاعات مربوط به ECU (واحد کنترل الکترونیکی) و نرمافزارهای متن باز مرتبط با آن برو به سیکار







سیسوگ با افتخار فضایی برای اشتراک گذاری دانش شماست. برای ما مقاله بنویسید.