دیباگ Cortex-M از راه CAN؛ بینیاز از SWD/JTAG
به گفته hackster
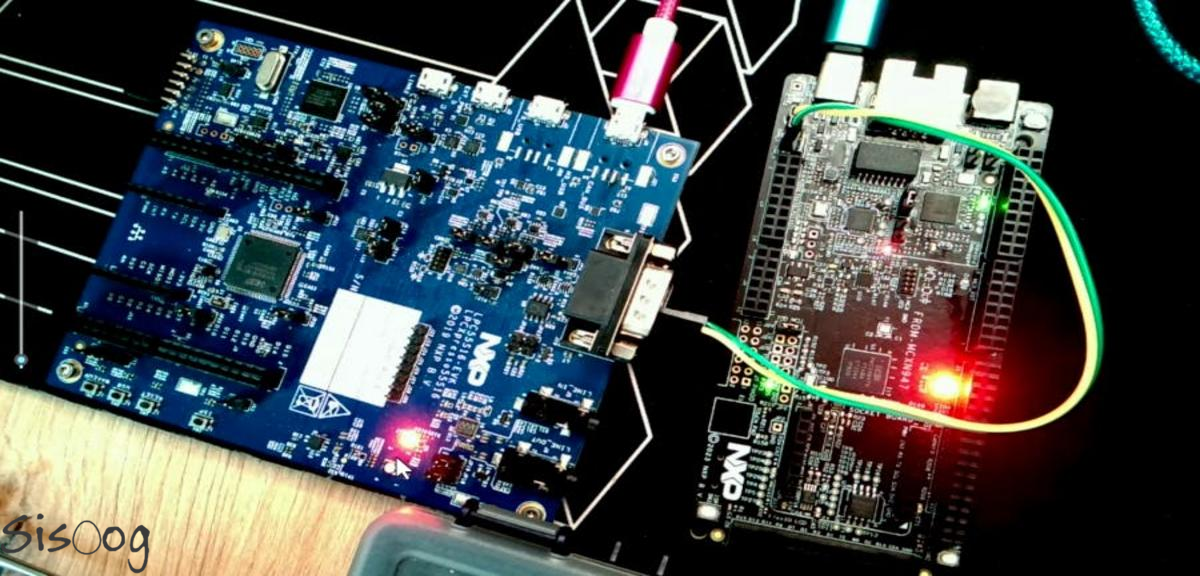
Erich Styger، مهندس امبدد و استاد، بههمراه دانشجویش Simon Kathriner روشی عملی برای دیباگ سختافزاری میکروکنترلرهای Arm Cortex‑M بدون نیاز به رابطهای سنتی SWD/JTAG ارائه کردهاند. ایدهی اصلی، استفاده از گذرگاه Controller Area Network (CAN) برای جابهجایی فرامین دیباگ و تکیه بر قابلیت «کمتر شناختهشده» DebugMonitor در خانوادهی Cortex‑M است. نتیجه، دیباگی است که در محصول نهایی و بدون دسترسی مستقیم به پینهای دیباگ هم قابل انجام است.
چرا همیشه SWD/JTAG پاسخگو نیست؟
دیباگ سنتی سختافزار معمولاً به یک پروب دیباگ و کابل SWD/JTAG متکی است. این روش:
- به پینهای اختصاصی روی هدف و دسترسی فیزیکی نیاز دارد که در محصول نهایی اغلب ممکن نیست.
- هزینهی پروب، کابل و طراحی پینها را تحمیل میکند و سیگنالهای پرسرعت آن مستعد تداخل است.
- در سامانههایی که همهی MCUها از قبل به یک field bus مانند CAN متصلاند، یک مسیر جایگزین منطقی و در دسترس وجود دارد.
Styger همین نکته را مبنا قرار داده: وقتی شبکهی CAN در دسترس است، چرا از آن برای دیباگ سختافزاری استفاده نکنیم؟
ایده و قابلیتها: دیباگ از طریق CAN با تکیه بر DebugMonitor
قابلیت DebugMonitor که در بسیاری از مدلهای Arm Cortex‑M موجود است (بهجز M0/M0+)، در این راهکار نقش کلیدی دارد. با استفاده از آن و یک چارچوب نرمافزاری سبک روی هدف، میتوان عملیاتهای مرسوم دیباگ را از راه دور و از طریق CAN انجام داد، از جمله:
- برنامهریزی فلش (flash programming)
- توقف کنترلر (halt)
- بازرسی/دستکاری حافظه (memory inspection)
- اجرای قدمبهقدم (instruction stepping)
به بیان Styger، DebugMonitor از «ویژگیهای کمتر ارزیابیشده» در اکوسیستم Cortex‑M است و برای ایجاد قلابهای دیباگ در زمان اجرا بسیار مناسب است.
زنجیرهی کامل بهصورتی طراحی شده که ابزارهای رایج توسعه تقریباً بدون تغییر باقی بمانند و تنها مسیر انتقال دیباگ از SWD/JTAG به CAN جابهجا شود:
۱) Host
- ابزارهای رایج مانند gdb و VS Code روی میزبان استفاده میشوند.
- پروتکل دیباگ CMSIS-DAP بهصورت معمولی از طریق USB تولید میشود.
۲) gateway USB↔CAN
- یک gateway اختصاصی پیامهای CMSIS-DAP را بین USB و CAN ترجمه میکند.
- این پل باعث میشود هیچ تغییری در gdb یا VS Code لازم نباشد و مسیر حمل فقط از SWD/JTAG به CAN منتقل گردد.
۳) هدف مبتنی بر Arm Cortex‑M
- روی هدف، یک چارچوب (framework) سبک نصب میشود که قلابهای لازم را به DebugMonitor متصل میکند.
- این چارچوب هنگام دیباگ، ارتباط معمول CAN دستگاه را زنده نگه میدارد؛ بنابراین رفتار شبکه مختل نمیشود.
- این قابلیت روی همهی هستههای Cortex‑M بهجز M0/M0+ قابل استفاده است.
| مولفه | نقش | جزئیات کلیدی |
|---|---|---|
| Host Tools | رابط توسعهدهنده | gdb، VS Code؛ خروجی دیباگ بر پایه CMSIS-DAP |
| USB↔CAN Gateway | ترجمه پروتکل/حمل | تبدیل CMSIS-DAP از USB به CAN و بالعکس |
| Target Framework | اجرای قلابهای دیباگ | استفاده از DebugMonitor در Cortex‑M؛ حفظ ارتباط CAN حین دیباگ |
| Supported MCUs | سازگاری | Arm Cortex‑M (بهجز M0/M0+) |
| Debug Functions | عملیاتها | Flash programming، halt، memory inspection، instruction stepping |
مزایا
- دیباگ در محصول نهایی: هنگامی که دسترسی فیزیکی به پینهای SWD/JTAG ممکن نیست.
- کاهش هزینه و پیچیدگی: حذف کانکتورهای دیباگ و مسیرهای پرسرعت حساس به تداخل.
- استفاده از زیرساخت موجود: در سامانههای چند-کنترلره که از قبل به CAN متصلاند.
- حفظ سرویسدهی شبکه: چارچوب هدف ارتباط CAN را حین دیباگ قطع نمیکند.
معایب
- نیاز به شبکه/رابط CAN در دستگاههای هدف.
- نیاز به پشتیبانی DebugMonitor؛ این قابلیت در همهی Cortex‑Mها بهجز M0/M0+ موجود است.
- حضور یک gateway برای تبدیل CMSIS-DAP بین USB و CAN.
انتشار، پروژه و منابع
چارچوبی که DebugMonitor را به دیباگ روی CAN پیوند میدهد، توسط Simon Kathriner (دانشجوی Erich Styger) نوشته شده و در GitLab با مجوز متنباز نامشخص منتشر شده است. توضیحات فنی و روند کار در وبلاگ Styger بهتفصیل آمده است.




پالت | بازار خرید و فروش قطعات الکترونیک
قطعات اضافه و بدون استفاده همیشه یکی از سربارههای شرکتها و طراحان حوزه برق و الکترونیک بوده و هست. پالت سامانهای است که بصورت تخصصی اجازه خرید و فروش قطعات مازاد الکترونیک را فراهم میکند. فروش در پالت
آیسی | موتور جستجوی قطعات الکترونیک
سامانه آی سی سیسوگ (Isee) قابلیتی جدید و کاربردی از سیسوگ است. در این سامانه سعی شده است که جستجو، انتخاب و خرید مناسب تر قطعات برای کاربران تسهیل شود. جستجو در آیسی
سیسوگشاپ | فروشگاه محصولات Quectel
فروشگاه سیسوگ مجموعه ای متمرکز بر تکنولوژی های مبتنی بر IOT و ماژول های M2M نظیر GSM، GPS، LTE، NB-IOT، WiFi، BT و ... جایی که با تعامل فنی و سازنده، بهترین راهکارها انتخاب می شوند. برو به فروشگاه سیسوگ
سیسوگ فروم | محلی برای پاسخ پرسشهای شما
دغدغه همیشگی فعالان تخصصی هر حوزه وجود بستری برای گفتگو و پرسش و پاسخ است. سیسوگ فروم یک انجمن آنلاین است که بصورت تخصصی امکان بحث، گفتگو و پرسش و پاسخ در حوزه الکترونیک را فراهم میکند. پرسش در سیسوگ فرم
سیکار | اولین مرجع متن باز ECU در ایران
بررسی و ارائه اطلاعات مربوط به ECU (واحد کنترل الکترونیکی) و نرمافزارهای متن باز مرتبط با آن برو به سیکار







سیسوگ با افتخار فضایی برای اشتراک گذاری دانش شماست. برای ما مقاله بنویسید.