

به گفته hackster
برای تبدیل خانه به «خانهی هوشمند»، معمولاً دستگاههایی مانند لامپ، اسپیکر، دوربین و قفل در را به Wi‑Fi وصل میکنیم و سپس با یک رابط نرمافزاری — از اپلیکیشن سازنده گرفته تا پلتفرم متنباز Home Assistant — آنها را کنترل میکنیم. در همهی اینها، رابط کاربر از خود دستگاه جدا و فیزیکیاً مستقل است.
گروهی از پژوهشگران در Carnegie Mellon University این جدایی میان دستگاه و رابط را غیرطبیعی و ناکارآمد میدانند و رابط را بهعنوان بخشی امبدد از خودِ شیء بازتصویر کردهاند. سامانهی آنها میتواند به هر شیء کوچک معمولی در خانه توان حرکت مستقل بدهد؛ مثلاً ابزاری که روی میزِ بههمریخته، خودبهخود به سمت صاحبش میخزد یا گلدانی که وسط گرمای روز دنبال سایه میگردد.

این سامانه با نام LayMo (Layered Motion)، یک «لایهی حرکتی» نازک و خودکفا است که به زیرِ اشیای کوچک متصل میشود. پس از نصب، شیء میتواند روی سطح صاف حرکت کند، بچرخد یا موقعیت خود را تنظیم کند. تمایز LayMo در این است که بدون چرخ، ریل یا ربات خارجی حرکت را ممکن میکند — همهچیز در چند میلیمتر ضخامت اتفاق میافتد.
موتور حرکت LayMo بر دو سازوکار هماهنگ بنا شده است: ارتعاش برای تأمین انرژی حرکتی و هدایت الکتریکی برای کنترل جهت. ارتعاش توسط محرکهای ارتعاشی خطی رزونانسی (linear resonant actuators) فراهم میشود — همان نوعی که در گوشیها برای بازخورد لمسی (haptic feedback) بهکار میرود — و شیء را بر سطح میلرزاند. ارتعاشِ تنها، حرکت تصادفی ایجاد میکند؛ بنابراین LayMo یک لایهی دوم از سازههای تطبیقپذیرِ تاخورِ مسطح (flat-foldable compliant structures) میافزاید تا دقت هدایت را تأمین کند.
این سازهها از الاستومرهای کریستال مایع (Liquid Crystal Elastomers, LCEs) ساخته شدهاند؛ مادهای فعال که با گرما منقبض میشود. با عبور جریان از گرمکنهای لایهای امبدد (film heaters)، LCE گرم و خم میشود و «پا»های کوچکی را به بیرون تا میکند. این پاها نواحی با اصطکاک تفاضلی (differential friction) میسازند — اصطکاک کم در یک جهت و زیاد در جهت مخالف — که بردار حرکت شیء را تعیین میکند. با فعالسازی انتخابی مجموعههای متفاوتی از پاها، سامانه به جلو، عقب، چپ/راست یا بهصورت درجا میچرخد.

مکانیزم حرکتیِ پا هنگام انقباض
هر ماژول LayMo شامل یک میکروکنترلر (microcontroller)، گرمکن، ترمیستور (thermistor) و موتور ارتعاشی است که همگی در یک برد مدار چاپی انعطافپذیر (flexible printed circuit board) یکپارچه شدهاند. طراحی ماژولار آن مقیاسپذیر است؛ میتوان چند ماژول را کنار هم چید تا اشیای بزرگتر یا سنگینتر را جابهجا کرد — در آزمونهای تیم پژوهشی، تا حدود 1.2 kilograms.
با ترکیب این لایهها، شیء میتواند بهصورت فیزیکی با کاربر «همکاری» کند. تصور کنید خطکشی که روی میز سر میخورد تا اندازهگیری را نشان دهد، یا پالت رنگی که وقتی دست هنرمند نزدیک میشود، خودش جلو میآید. تیم تحقیقاتی آیندهای را تصور میکند که تولیدکنندگان، چنین لایههای حرکتی را هنگام مونتاژ، مستقیماً در محصولات امبدد کنند تا ردهی تازهای از رابطهای فیزیکی پویا شکل بگیرد. اینکه کاربران از حرکتِ دائمی اشیا در خانه استقبال کنند یا نه، هنوز روشن نیست.
LayMo با حذف نیاز به عملگرهای مرسوم مانند چرخ و ریل و با اتکا به ترکیب «ارتعاش + هدایت حرارتی»، یک مسیر عملی برای ساخت رابطهای فیزیکی خودحرکتده ارائه میکند؛ مسیری که بهراحتی قابل امبدد شدن در محصولات آتی و قابل توسعه با چینش چندماژوله است.
من اون دیوونهام که وقتی بورد روشن نمیشه، ذوق میکنم؛ یعنی یه شب تا صبح قراره با منبع تغذیه و لاجیک آنالایزر عشق کنم! آدما قهوه میخورن که بیدار بمونن، ولی من بیدار میمونم تا بفهمم این بورد چرا باهام قهر کرده! زندگی من یه لوپ بینهایته بین باگ و دیباگ... با چاشنی یه کم امید و یه عالمه دیوونگی!

پالت | بازار خرید و فروش قطعات الکترونیک
قطعات اضافه و بدون استفاده همیشه یکی از سربارههای شرکتها و طراحان حوزه برق و الکترونیک بوده و هست. پالت سامانهای است که بصورت تخصصی اجازه خرید و فروش قطعات مازاد الکترونیک را فراهم میکند. فروش در پالت
آیسی | موتور جستجوی قطعات الکترونیک
سامانه آی سی سیسوگ (Isee) قابلیتی جدید و کاربردی از سیسوگ است. در این سامانه سعی شده است که جستجو، انتخاب و خرید مناسب تر قطعات برای کاربران تسهیل شود. جستجو در آیسی
سیسوگشاپ | فروشگاه محصولات Quectel
فروشگاه سیسوگ مجموعه ای متمرکز بر تکنولوژی های مبتنی بر IOT و ماژول های M2M نظیر GSM، GPS، LTE، NB-IOT، WiFi، BT و ... جایی که با تعامل فنی و سازنده، بهترین راهکارها انتخاب می شوند. برو به فروشگاه سیسوگ
سیسوگ فروم | محلی برای پاسخ پرسشهای شما
دغدغه همیشگی فعالان تخصصی هر حوزه وجود بستری برای گفتگو و پرسش و پاسخ است. سیسوگ فروم یک انجمن آنلاین است که بصورت تخصصی امکان بحث، گفتگو و پرسش و پاسخ در حوزه الکترونیک را فراهم میکند. پرسش در سیسوگ فرم
سیکار | اولین مرجع متن باز ECU در ایران
بررسی و ارائه اطلاعات مربوط به ECU (واحد کنترل الکترونیکی) و نرمافزارهای متن باز مرتبط با آن برو به سیکار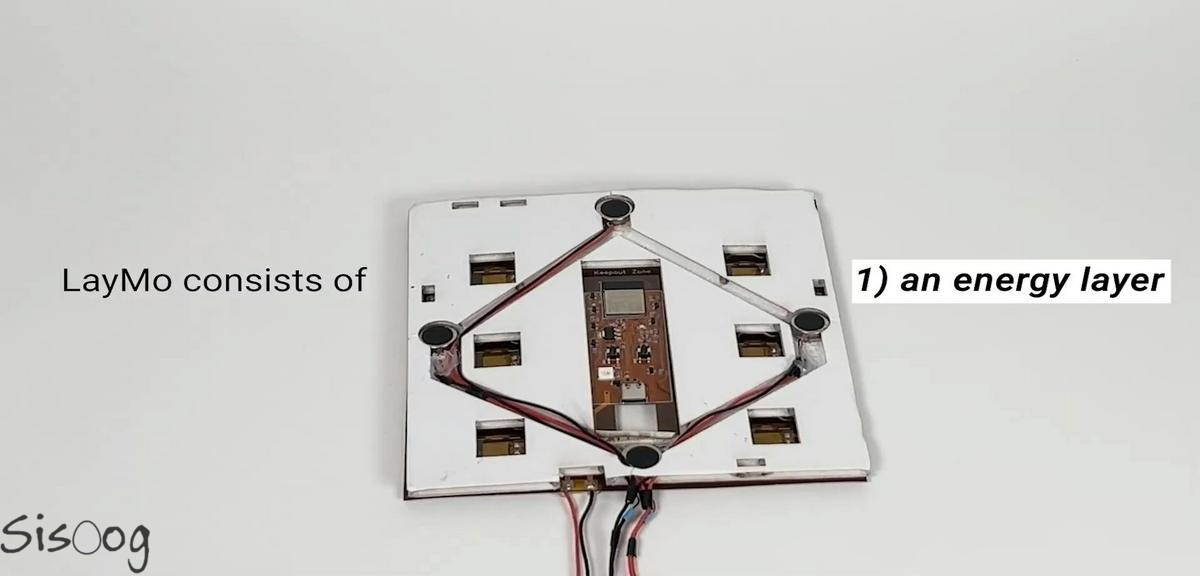












سیسوگ با افتخار فضایی برای اشتراک گذاری دانش شماست. برای ما مقاله بنویسید.