جعبهابزار رباتیک ماژولار SNU؛ تحول در طراحی میکرورباتهای زیرسانتیمتری
به گفته hackster
میکرورباتها (microrobot) با طول کمتر از یک سانتیمتر میتوانند وارد فضاهایی شوند که هیچ رباتی تاکنون نرفته است. در نظریه، حتی ممکن است روزی درون بدن انسان پرسه بزنند تا بیماریها را تشخیص دهند و درمان کنند. اما در عمل، هنوز فاصلهی زیادی با این هدف داریم. مقیاس بسیار کوچک، چالشهای فنی جدی بههمراه دارد که باید یکییکی برطرف شوند.
کوچکترین رباتهای امروزی از نظر توانمندی محدودند، چون جای اندکی برای جای دادن سختافزار مفید در ابعاد مورچه وجود دارد. ناگزیر، این رباتها معمولاً تکمنظوره طراحی میشوند. فضای اضافهای نیست؛ پس هر میکروربات معمولاً فقط برای یک کار ساخته میشود. این دو عامل، بهطور جدی پذیرش در کاربردهای واقعی را محدود میکند.
طراحی ماژولار: بدنه و ماژولها
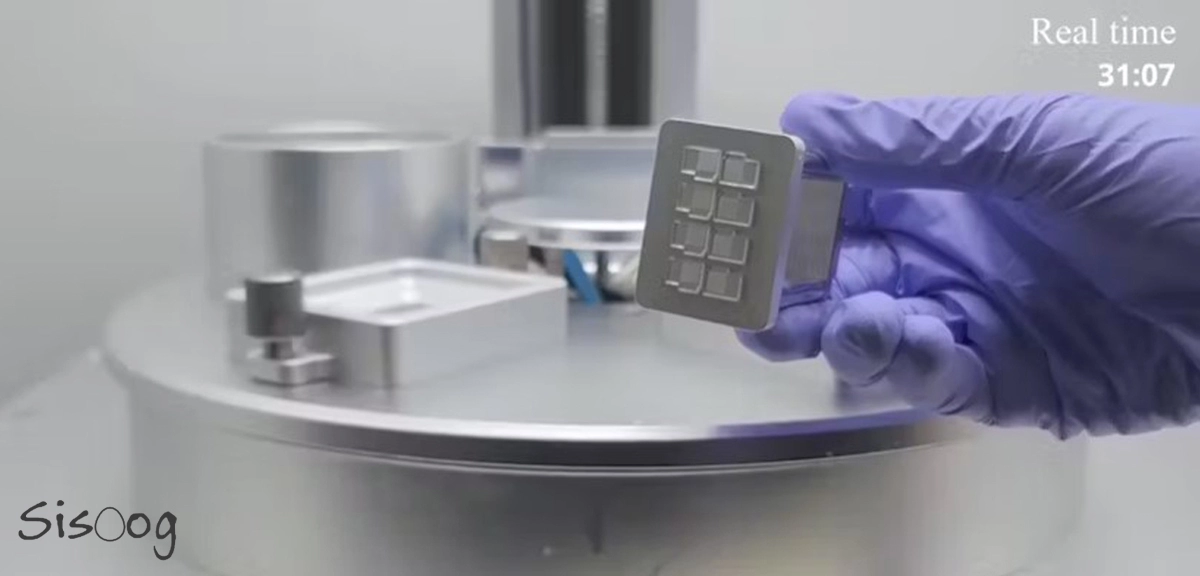
یک گروه در Seoul National University میخواهد این قواعد را تغییر دهد. آنها یک جعبهابزار رباتیک ماژولار (modular) ساختهاند که طراحی یک «گروه کوچک» از میکرورباتهای متنوع را در زمان کوتاه ممکن میکند. این رباتهای زیرسانتیمتری میتوانند راه بروند، جهتیابی کنند و محیط را حس کنند و تقریباً بهطور کامل با چاپ سهبعدی (3D printing) ساخته شدهاند.
بهجای ساخت یک میکروربات تکمنظوره، تیم یک بدنهی پایه طراحی کرده که با انواع ماژولهای قابل تعویض تجهیز میشود. هر ماژول یک کارکرد مشخص ارائه میدهد و کنار هم به ربات امکان انطباق با محیطها یا مأموریتهای جدید را میدهد. بدنهی اصلی نقش واحد کنترل مرکزی را دارد و محرکها (actuator) را در خود جای میدهد تا حرکت ربات را تامین کند. از اینجا، ماژولهای تخصصی — مثل پا برای راهرفتن، سر برای حسگری یا ارتباط و کانکتور برای اتصال چند ربات — بسته به نیاز افزوده میشوند.

این رباتها از ماژولها (واحدهای کوچک) مونتاژ شدهاند.
چاپگر چندماده مبتنی بر DLP
برای جانبخشیدن به این میکرورباتهای ماژولار، پژوهشگران یک چاپگر سهبعدی چندماده سفارشی بر پایهی Digital Light Processing (DLP) ساختهاند. بر خلاف چاپگرهای معمولی، این چاپگر بهصورت همزمان چند نوع رزین را چاپ میکند: مواد نرم، سخت، رسانا و دیالکتریک؛ با رزولوشن تا 10 میکرومتر. این قابلیت اجازه میدهد تمام قطعات مکانیکی، سازهای و الکتریکی ربات در یک مرحله چاپ شوند. همچنین تولید انبوه قطعات را ممکن میکند: تا 8 واحد میکروربات مشابه در یک نوبت چاپ میشوند.
محرک الاستومری دیالکتریک (DEA) هیبرید
یکی از دستاوردهای مهم تیم، معرفی نوعی محرک الاستومری دیالکتریک (Dielectric Elastomer Actuator یا DEA) جدید است. محرکها همان چیزی هستند که ربات را به حرکت درمیآورند و در این ابعاد باید هم توانمند و هم سبک باشند. تیم یک محرک هیبرید نرم-سخت ساخت که با اعمال میدان الکتریکی خم میشود و انعطاف نشان میدهد. لایههای نرم، انعطافپذیری و جابجایی را تامین میکنند و لایههای سخت مسیر حرکت را هدایت و دامنه را تقویت میکنند.
این طراحی به میکرورباتها قوام و دامنهی حرکتی کافی میدهد تا روی شن گام بردارند، از موانع بالا بروند و حتی در آب شنا کنند. ترکیب مواد نرم و سخت در مقیاس میکرونی، نسبت نیرو به وزن مناسبی ایجاد میکند بدون آنکه پیچیدگی مونتاژ یا وزن اضافه تحمیل شود.

این رباتها میتوانند به یکدیگر متصل شوند تا نیروهایشان را با هم ترکیب کنند.
ماژولهای پا و سر: انطباق و ارتباط
ماژولهای پا به ربات اجازه میدهند با محیطهای متفاوت سازگار شود:
- روی سطح صاف، از چسبندگی الکترواستاتیکی (electrostatic adhesion) برای چنگزدن و سرخوردن رو به جلو بهره میبرد.
- روی سطوح زبر یا دانهای، پاهای نامتقارن کشش جهتدار ایجاد میکنند.
- روی آب، ماژول پردهدار و شناور، ربات را روی سطح نگه میدارد و امکان پارو زدن میدهد.
ماژولهای سر کارکردهای ربات را بیشتر گسترش میدهند. یک نسخه سیگنال نوری منتشر میکند تا با رباتهای دیگر ارتباط بگیرد؛ نسخهای دیگر نزدیکشدن اشیاء را تشخیص میدهد تا از برخورد جلوگیری کند؛ و نسخهی سوم سطح نور محیط (ambient light) را میسنجد. تیم، ارتباط بلادرنگ بین میکرورباتها را نمایش داد: یک رهبر با سرِ نورافشان، یک دنبالکننده را با سیگنالهای نوری هدایت کرد.
کاربردها
این رباتها هنوز آنقدر کوچک یا توانمند نیستند که در جریان خون انسان شنا کنند و درمان ارائه دهند؛ با این حال، همین جعبهابزار ماژولار گامی معنادار برای پیشرفت است که نشان میدهد میتوان در مقیاس میکرو، حرکت و سازگاری را با طراحی ماژولار و چاپ سهبعدی چندماده کنار هم نشاند و سریع نمونهسازی و تولید کرد.




پالت | بازار خرید و فروش قطعات الکترونیک
قطعات اضافه و بدون استفاده همیشه یکی از سربارههای شرکتها و طراحان حوزه برق و الکترونیک بوده و هست. پالت سامانهای است که بصورت تخصصی اجازه خرید و فروش قطعات مازاد الکترونیک را فراهم میکند. فروش در پالت
آیسی | موتور جستجوی قطعات الکترونیک
سامانه آی سی سیسوگ (Isee) قابلیتی جدید و کاربردی از سیسوگ است. در این سامانه سعی شده است که جستجو، انتخاب و خرید مناسب تر قطعات برای کاربران تسهیل شود. جستجو در آیسی
سیسوگشاپ | فروشگاه محصولات Quectel
فروشگاه سیسوگ مجموعه ای متمرکز بر تکنولوژی های مبتنی بر IOT و ماژول های M2M نظیر GSM، GPS، LTE، NB-IOT، WiFi، BT و ... جایی که با تعامل فنی و سازنده، بهترین راهکارها انتخاب می شوند. برو به فروشگاه سیسوگ
سیسوگ فروم | محلی برای پاسخ پرسشهای شما
دغدغه همیشگی فعالان تخصصی هر حوزه وجود بستری برای گفتگو و پرسش و پاسخ است. سیسوگ فروم یک انجمن آنلاین است که بصورت تخصصی امکان بحث، گفتگو و پرسش و پاسخ در حوزه الکترونیک را فراهم میکند. پرسش در سیسوگ فرم
سیکار | اولین مرجع متن باز ECU در ایران
بررسی و ارائه اطلاعات مربوط به ECU (واحد کنترل الکترونیکی) و نرمافزارهای متن باز مرتبط با آن برو به سیکار







سیسوگ با افتخار فضایی برای اشتراک گذاری دانش شماست. برای ما مقاله بنویسید.