

انتخاب قطعه مناسب برای مدیریت هوشمند روشنایی، از تصمیماتی است که در طراحی سیستمهای اتوماسیون و اینترنت اشیا اهمیت زیادی دارد و پایداری محصول شما را تعیین میکند. در طراحی سیستمهای IOT، شاهد هستیم که طراحان به اشتباه سنسورهای مایکروویو راداری، فتوسلهای نوری و سنسورهای PIR را بهجای یکدیگر استفاده میکنند. اما از نظر مهندسی سختافزار، این انتخاب مستقیماً بر پایداری مدار، بهینهسازی مصرف انرژی و جلوگیری از سوئیچینگهای کاذب در محیط های پرنویز تأثیر میگذارد.
جدول زیر تفاوتهای کلیدی این سه قطعه را در معماری سیستمهای روشنایی هوشمند نشان میدهد:
|
ویژگی تخصصی |
مایکروویو (رادار داپلر) |
سنسور مادون قرمز منفعل (PIR) |
فتوسل (LDR) |
|
متغیر اندازهگیری |
شیفت فرکانسی سیگنال بازگشتی؛ معمولاً در باندهای ISM مانند ۳.۲ یا ۵.۸ گیگاهرتز |
تغییرات تشعشع فروسرخ (گرمای بدن) |
تغییر مقاومت وابسته به فوتون |
|
جریان مصرفی |
بالا (حدود ۲ تا ۵ میلیآمپر بسته به ماژول – اکتیو) |
بسیار پایین (حدود ۵۰ میکروآمپر – پسیو) |
بسیار پایین، وابسته به مدار بایاس و تقسیم ولتاژ |
|
نفوذپذیری |
بله (نصب مخفی پشت شیشه، گچ و پلاستیک) |
خیر (پشت شیشه معمولی عملکرد ندارد؛ عبور از برخی پلاستیکها وابسته به جنس آنهاست) |
خیر (نیاز به دریافت نور محیط دارد) |
|
عوامل خطای تشخیص |
بازتاب از سطوح فلزی و شیلدینگ، لرزش اجسام، حساسیت به نویزهای RF/EMI |
افزایش دمای محیط (کاهش اختلاف دمایی)، تغییرات سریع منابع حرارتی و تابش خورشید |
نور چراغ خودرو، کثیفی لنز، سایهها |
|
کاربرد |
پارکینگهای هوشمند، راهروهای طولانی، نصب کاملاً توکار و مخفی در معماری مدرن |
تجهیزات IOT باتریخور، روشنایی راهپلهها و فضاهای مسقف، سیستمهای امنیتی (با دید مستقیم) |
اتوماسیون روشنایی معابر (غروب تا طلوع)، نورپردازی نمای ساختمان و تابلوهای تبلیغاتی |
|
محدودیتها |
مصرف توان پیوسته نسبتاً بالا (نامناسب برای باتری)، احتمال خطای سوئیچینگ بر اثر حرکت اجسام در محیط (پرده، فن یا جریان سیال در لولهها) |
افت شدید حساسیت در تابستان (از بین رفتن Delta-T)، محدودیت زاویه دید و وابستگی شدید به لنز فرسنل |
چالش پدیده Chattering در نور مرزی، استهلاک بالای رلهها در مدارات فاقد اشمیت تریگر |
برای درک بهتر اینکه چطور موانع فیزیکی، دمای محیط و شدت نور بر تریگر شدن هر سنسور اثر میگذارند، میتوانید پارامترهای مختلف را در شبیهساز زیر تغییر دهید:

سنسور فتوسل
فتوسلها یا همان سنسورهای غروب تا طلوع (Dusk-to-Dawn)، در هسته مرکزی خود از یک مقاومت نوری (LDR) بهره میبرند که در بازار ما معمولاً از جنس سولفید کادمیوم (CdS) است.
این قطعه بر پایه پدیده فوتوالکتریک داخلی کار میکند. در تاریکی مطلق، مقاومت LDR به شدت بالا و در محدوده مگااهم است. وقتی فوتونهای نوری به سطح سنسور میتابند، مقاومت الکتریکی به شکل لگاریتمی افت میکند و به چند صد اهم میرسد. همین تغییر مقاومت، ولتاژ ورودی یک مقایسهکننده یا Comparator را تغییر میدهد و در نهایت باعث سوئیچ شدن رله خروجی میشود.
بزرگترین نقطه ضعف مدارهای سادهی فتوسل که احتمالاً در پروژهها با آن برخورد کردهاید، واکنش نشان دادن آنها در لحظه گرگومیش هواست. وقتی نور محیط دقیقاً روی آستانه یا Threshold قرار میگیرد، مدار دچار قطع و وصل مکرر و سریع رله میشود که به آن پدیده چتر یا Chattering میگویند. همانطور که در کتاب مرجع The Art of Electronics هم بررسی شده، راهکار مهندسی برای حل این چالش، استفاده از مدار اشمیت تریگر است. این تکنیک با ایجاد پدیده هیسترزیس (Hysteresis)، یک فاصله منطقی بین ولتاژ روشن و خاموش شدن ایجاد میکند تا مدار به نوسانات ریز نوری واکنش نشان ندهد و رلههای مدار نسوزند.

سنسور PIR
اگر سیستم IoT شما قرار است با باتری کار کند، سنسور PIR بهترین گزینه است. این سنسورها کاملاً پسیو هستند، یعنی هیچ موجی ساطع نمیکنند و فقط منتظر میمانند تا یک منبع حرارتی، مثل بدن انسان، از مقابل لنز فرسنل آنها عبور کند.
اما به عنوان هشدار در نظر داشته باشید که در ظهرهای گرم تابستان که دمای محیط به دمای بدن یعنی ۳۷ درجه نزدیک میشود، اختلاف دمایی (Delta-T) از بین رفته و سنسور عملاً کور میشود. همچنین، سنسورهای PIR برخلاف مایکروویو، پشت شیشه یا قابهای پلاستیکی کدر کار نمیکنند و نیاز به لنزهای مخصوص دارند.

سنسور مایکروویو
سنسور مایکروویو مانند ماژول RCWL-0516 برعکس سنسور مادون قرمز PIR، یک سنسور فعال یا اکتیو است. این ماژولها مانند یک رادار موج پیوسته عمل کرده و بر اساس اثر داپلر یا Doppler Effect حرکت را تشخیص میدهند.
معادله تغییر فرکانس در این سنسورها به این شکل محاسبه میشود:

بزرگترین مزیت مایکروویو این است که امواج آن از موانع غیرفلزی عبور میکند، یعنی شما میتوانید سنسور را کاملاً مخفی کنید، مثلاً پشت کناف یا داخل حباب لامپ، نصب کنید. اما حواستان به اثر شیلدینگ باشد. فلزات امواج را بازتاب میدهند و سنسور را کور میکنند. همچنین، لرزش شیشهها در باد یا حرکت آب در لولههای پشت دیوار میتواند باعث خطای تشخیص شود.
در طراحیهای حرفهای، ما معمولاً سنسورها را با هم ترکیب میکنیم. سنسور مایکروویو بهدلیل اکتیو بودن، جریان مصرفی بالایی دارد که برای یک نود IoT همیشه روشن، ایدهآل نیست.
طراحان از فتوسل بهعنوان فعالساز اصلی یا Master Enable استفاده میکنند. بسیاری از ماژولهای راداری، مثل RCWL-0516، پین اختصاصی CDS دارند. با اتصال LDR به این پین، مدار رادار در طول روز که نور کافی است، به حالت Sleep میرود تا مصرف انرژی استندبای به حداقل کاهش یابد. به محض تاریک شدن هوا، رادار بیدار شده و منتظر تشخیص حرکت میماند. به این ترتیب، طراحی هوشمندانه سختافزار، طول عمر باتری و پایداری سیستم شما را تضمین میکند.

|
معیار IoT |
مایکروویو (رادار داپلر) |
PIR (مادونقرمز منفعل) |
فتوسل (LDR) |
|
نقش در سیستم |
تشخیص حرکت/حضور با نفوذ از موانع غیرفلزی |
تشخیص حرکت انسان با مصرف بسیار کم |
تشخیص روز/شب و روشنایی محیط |
|
مصرف توان معمول |
mA5-2 (ماژولهای رایج مانند RCWL-0516) |
80-30 µA (سناریوی باتری) |
دهها تا صدها µA بسته به بایاس |
|
مناسب برای تغذیه باتری |
متوسط (نیاز به duty-cycle یا sleep gating) |
عالی |
خوب (برای روز/شب؛ همیشه فعال نه) |
|
نفوذپذیری |
عبور از گچ/پلاستیک؛ انسداد توسط فلز |
نیاز به میدان دید IR؛ پشت شیشه/پلاستیک کدر دارای عملکرد خوبی نیست |
باید نور محیط را ببیند؛ پشت پوشش عمل نمیکند |
|
پایداری در نویز محیطی |
حساس به RF/EMI، لرزش سازه/شیشه، حرکت آب در لولهها |
حساس به گرمای پسزمینه و تابش مستقیم خورشید |
حساس به سایه/نور خودرو/نوسان آستانه |
|
دقت در تفکیک انسان از غیرانسان |
متوسط (حرکت هر جرم) |
خوب (به تغییرات IR بدن انسان حساستر) |
ندارد (صرفاً قابلیت تشخیص نور دارد) |
|
برد/زاویه پوشش |
وسیع، قابل تنظیم با شیلدینگ/توان |
تابع لنز فرسنل، معمولاً 90-120 درجه |
تابع موقعیت و دیفیوزر |
|
تاخیر/زمان پاسخ |
سریع (ms) |
سریع (100-500 ms) |
کندتر، وابسته به فیلتر RC/اشمیت تریگر |
|
تنظیم آستانه و فیلتر |
نیاز به فیلتر EMI، زمانبندی خروجی، Blanking |
تنظیم حساسیت و زماننگهدار (hold time) |
اشمیت تریگر برای هیسترزیس، فیلتر RC نوسانگیر |
|
خطر False Trigger |
متوسط تا زیاد در محیطهای پرنویز مکانیکی/الکتریکی |
متوسط در دمای محیط بالا و نور شدید |
زیاد در گرگومیش بدون هیسترزیس |
|
یکپارچهسازی با MCU |
خروجی دیجیتال/آنالوگ؛ نیاز به تثبیت تغذیه |
خروجی دیجیتال؛ بسیار کممصرف برای Interrupt |
تقسیم مقاومتی به ADC یا Comparator با رفرنس |
|
اثر روی RF شبکه (Wi-Fi/ISM) |
امکان تداخل هارمونیکی یا حساسیت به RF؛ نیاز به فاصلهگذاری و فیلتر |
ناچیز |
ناچیز |
|
کالیبراسیون میدانی |
تنظیم حساسیت و پنجره زمانی |
تنظیم حساسیت و لنز/زاویه نصب |
تنظیم آستانه روز/شب و هیسترزیس |
|
کاربرد پیشنهادی IoT |
حضور مخفی پشت سقف/دیوار، روشنایی راهرو/پارکینگ |
روشنایی باتریخور داخلی، اتاقها، سرویسها |
Master Enable برای روز/شب، حساسسازی منطقی |
|
نکته طراحی IoT |
استفاده از پین CDS یا گیت تغذیه برای Sleep روزانه؛ فیلتر کردن EMI؛ فاصله از آنتن Wi-Fi |
Interrupt محور؛ تایم اوت تطبیقی بر مبنای دمای محیط؛ انتخاب لنز مناسب |
اعمال اشمیت تریگر/هیسترزیس؛ میانگینگیری زمانی؛ کالیبراسیون آستانه در محل |
|
ترکیب بهینه |
مایکروویو + فتوسل برای کاهش مصرف روزانه |
PIR + فتوسل برای باتری، یا منطق AND |
فتوسل بهعنوان Master Enable برای PIR/مایکروویو استفاده گردد |
انتخاب بین این سنسورها به طراحی و ساختار سیستم شما بستگی دارد. آیا تا بهحال با مشکل پرش رله در سنسورهای نوری مواجه شدهاید؟ یا تجربهای در زمینه تداخل ماژولهای راداری با شبکه Wi-Fi محیط داشتهاید؟ تجربیات خود را در بخش نظرات با ما به اشتراک بگذارید.

پالت | بازار خرید و فروش قطعات الکترونیک
قطعات اضافه و بدون استفاده همیشه یکی از سربارههای شرکتها و طراحان حوزه برق و الکترونیک بوده و هست. پالت سامانهای است که بصورت تخصصی اجازه خرید و فروش قطعات مازاد الکترونیک را فراهم میکند. فروش در پالت
آیسی | موتور جستجوی قطعات الکترونیک
سامانه آی سی سیسوگ (Isee) قابلیتی جدید و کاربردی از سیسوگ است. در این سامانه سعی شده است که جستجو، انتخاب و خرید مناسب تر قطعات برای کاربران تسهیل شود. جستجو در آیسی
سیسوگشاپ | فروشگاه محصولات Quectel
فروشگاه سیسوگ مجموعه ای متمرکز بر تکنولوژی های مبتنی بر IOT و ماژول های M2M نظیر GSM، GPS، LTE، NB-IOT، WiFi، BT و ... جایی که با تعامل فنی و سازنده، بهترین راهکارها انتخاب می شوند. برو به فروشگاه سیسوگ
سیسوگ فروم | محلی برای پاسخ پرسشهای شما
دغدغه همیشگی فعالان تخصصی هر حوزه وجود بستری برای گفتگو و پرسش و پاسخ است. سیسوگ فروم یک انجمن آنلاین است که بصورت تخصصی امکان بحث، گفتگو و پرسش و پاسخ در حوزه الکترونیک را فراهم میکند. پرسش در سیسوگ فرم
سیکار | اولین مرجع متن باز ECU در ایران
بررسی و ارائه اطلاعات مربوط به ECU (واحد کنترل الکترونیکی) و نرمافزارهای متن باز مرتبط با آن برو به سیکار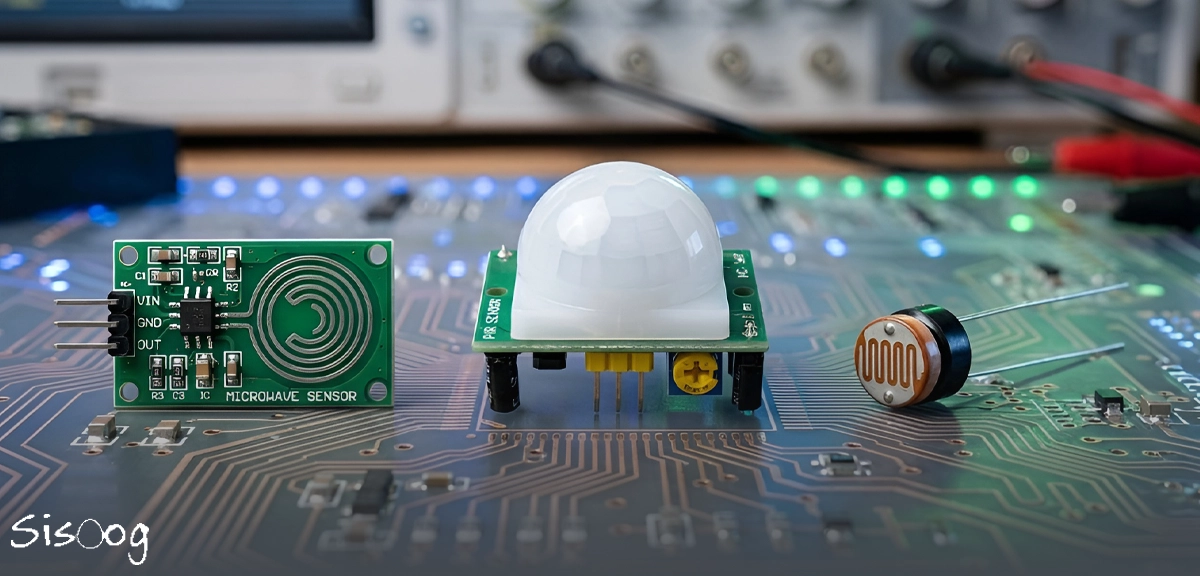









سیسوگ با افتخار فضایی برای اشتراک گذاری دانش شماست. برای ما مقاله بنویسید.