ربات های دارای عضلات مصنوعی نسبت به ربات های موتور محور عملکرد بهتری دارند
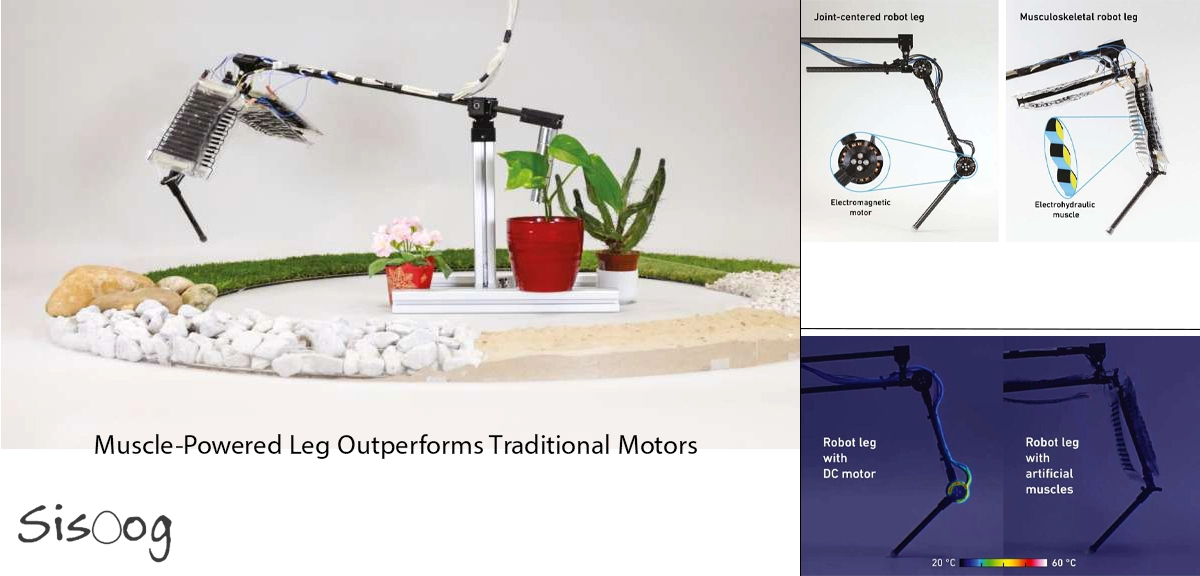
استفاده از محرکهای الکترو-هیدرولیک، سبب میشود که ربات حرکات طبیعی عضلات را تقلید کند. این رباتها از ترکیب نیروهای الکتریکی و هیدرولیکی ساخته میشوند، به همین دلیل حرکات دقیقی از خود نشان میدهند. فناوری به کار رفته در این رباتها سبب میشود که حرکات نرم و طبیعی داشته باشد. این فناوری به بخصوص در رابطه با پروتزها بسیار حائز اهمیت است. این فناوری همچنین سبب میشود که سیستمها توانایی خوبی برای تطبیق خود با تغییرات محیطی داشته باشند و بتوانند به آنها پاسخ دهند. کاهش حرارت تولیدی یکی از مزایای این فناوری است که باعث افزایش کارایی و طول عمر سیستم میشود و از آسیبدیدگی ناشی از دما در آن جلوگیری میکند.
نزدیک به هفت دهه، رباتها برای آنکه حرکت کنند متکی بر نیروی موتور بودند. این فناوری قدیمی که بیش از 200 سال قدمت دارد، باعث ایجاد محدودیت رباتها در انطباقپذیری آنها نسبت به موجودات زنده میشود؛ اما به تازگی محققان دانشگاه ETH زوریخ و مؤسسه ماکس پلانک توانستند با استفاده از محرکهای الکترو-هیدرولیکی به نام HASELs، تحول جدیدی در حرکت کردن رباتها ایجاد کنند. این محرکها حرکات عضلانی طبیعی انسانها و حیوانات را شبیهسازی میکنند و به رباتها این امکان را میدهند که حرکات نرمتر و طبیعیتری داشته باشند. این فناوری عملکرد رباتها را در محیطهای مختلف بهبود میدهد و باعث میشود که بتوان از آنها در صنایع گوناگونی استفاده کرد.

این محرکها در واقع مثل بالونهایی پر از روغن هستند که الکترودهای آنها به یکدیگر ولتاژ وارد و متعاقباً از هم ولتاژ دریافت میکنند. این باعث جابجایی روغن و تغییر شکل محرک میشود. در نتیجه انقباض و انبساط عضلات شبیهسازی میشود. مهمترین مزیت این تکنولوژی را میتوان بهرهوری انرژی آن دانست. برخلاف موتورهای الکتریکی که انرژی را بهصورت گرما هدر میدهند و به سیستمهای خنککننده نیاز دارند، پای الکتروهیدرولیکی به دلیل طبیعت الکترواستاتیکی خود دمای پایدارتری دارد. پژوهشگران دریافتند که موتورهای معمولی نسبت به پاهای الکتروهیدرولیکی انرژی بسیار بیشتری مصرف میکنند و در نتیجه گرمای تولید شده هم زیاد است. در حالی که سیستم جدید بهرهوری انرژی بیشتر و همچنین چابکی فوقالعادهای دارد. این پای الکتروهیدرولیکی میتواند پرشهای بلندی داشته باشد و به سرعت خود را با سطوح ناهموار سازگار کند، بدون اینکه به سنسورهای خاصی نیاز داشته باشد. در عوض حرکت کردن این پا به واسطه سیگنالهای ورودی ساده کنترل میشود. این سیگنالها به قسمتهای مفصل مانند پا دستور میدهند که خم یا باز شوند.
این فناوری به پای رباتیک اجازه میدهد تا با محیط سازگار شود. درست مثل یک انسان که هنگام پرش از ارتفاع، وضعیت خود را تنظیم میکند، ربات هم همین کار را میکند. از این فناوری میتوان در مواردی که نیاز به تطبیقپذیری بالایی هست و بهرهوری انرژی هم اهمیت دارد، استفاده کرد. این فناوری میتواند منجر به ساخت رباتهای خودمختاری شود که قادر به حرکت در محیطهای پر چالش هستند.
منبع : electronicsforu



پالت | بازار خرید و فروش قطعات الکترونیک
قطعات اضافه و بدون استفاده همیشه یکی از سربارههای شرکتها و طراحان حوزه برق و الکترونیک بوده و هست. پالت سامانهای است که بصورت تخصصی اجازه خرید و فروش قطعات مازاد الکترونیک را فراهم میکند. فروش در پالت
آیسی | موتور جستجوی قطعات الکترونیک
سامانه آی سی سیسوگ (Isee) قابلیتی جدید و کاربردی از سیسوگ است. در این سامانه سعی شده است که جستجو، انتخاب و خرید مناسب تر قطعات برای کاربران تسهیل شود. جستجو در آیسی
سیسوگشاپ | فروشگاه محصولات Quectel
فروشگاه سیسوگ مجموعه ای متمرکز بر تکنولوژی های مبتنی بر IOT و ماژول های M2M نظیر GSM، GPS، LTE، NB-IOT، WiFi، BT و ... جایی که با تعامل فنی و سازنده، بهترین راهکارها انتخاب می شوند. برو به فروشگاه سیسوگ
سیسوگ فروم | محلی برای پاسخ پرسشهای شما
دغدغه همیشگی فعالان تخصصی هر حوزه وجود بستری برای گفتگو و پرسش و پاسخ است. سیسوگ فروم یک انجمن آنلاین است که بصورت تخصصی امکان بحث، گفتگو و پرسش و پاسخ در حوزه الکترونیک را فراهم میکند. پرسش در سیسوگ فرم
سیکار | اولین مرجع متن باز ECU در ایران
بررسی و ارائه اطلاعات مربوط به ECU (واحد کنترل الکترونیکی) و نرمافزارهای متن باز مرتبط با آن برو به سیکار







سیسوگ با افتخار فضایی برای اشتراک گذاری دانش شماست. برای ما مقاله بنویسید.