اندازهگیری سرعت موتورهای براشدار با استفاده از Back-EMF
موتورهای DC جاروبکی، یکی از پرکاربردترین و درعینحال ارزانترین انواع موتور در صنعت محسوب میشوند. این موتورها به دلیل ساختار ساده، قیمت مناسب و عمر قابلقبول توانستهاند جایگاه ویژهای نزد تولیدکنندگان دستگاههای صنعتی، پزشکی و بسیاری کاربردهای دیگر پیدا کنند.
وقتی صحبت از “حرکت” و “موتور” به میان میآید، محاسبه و پایش سرعت چرخش موتور یکی از پارامترهای اصلی در طراحی سختافزار و سیستم کنترلی به شمار میرود.

روشهای اندازهگیری سرعت موتور
روشهای متنوعی برای اندازهگیری سرعت موتور وجود دارد؛ از جمله:
- استفاده از سنسورهای اثر هال
- انکدرهای نوری یا مغناطیسی
- حسگرهای مکانیکی یا اپتیکی
- و….
هر کدام از این روشها هزینه، پیچیدگی و نیازمندیهای خاص خود را دارند.
یکی از روشهای نسبتاً ارزان و کمهزینه برای تخمین دور موتور، استفاده از ولتاژ Back-EMF است. این روش، همانطور که مزایایی مانند حذف نیاز به سنسور مکانیکی یا مغناطیسی دارد، معایب و محدودیتهای خاص خود را نیز به همراه خواهد داشت.
در این مقاله ابتدا به بررسی ساختمان داخلی موتورهای DC جاروبکی میپردازیم، سپس مفهومBack-EMF را توضیح میدهیم و در ادامه روش استفاده از آن برای تخمین سرعت موتور را با جزئیات بررسی خواهیم کرد.
ساختمان موتورهای DC

موتورهای جریان مستقیم (DC) بهطورکلی از چهار بخش اصلی تشکیل شدهاند که هر کدام نقش مشخصی در عملکرد موتور ایفا میکنند:
1) رتور (Rotor)
رتور بخش چرخنده موتور است. سیمپیچهای موتور روی این قسمت پیچیده میشوند و با عبور جریان از آنها، میدان مغناطیسی ایجاد میشود. تعامل این میدان با میدان مغناطیسی استاتور، باعث ایجاد گشتاور و در نهایت چرخش رتور میشود.
2) کوموتاتور (Commutator)
کوموتاتور وظیفه تغییر جهت جریان در سیمپیچها را بر عهده دارد. این تغییر جهت باعث میشود قطبهای مغناطیسی سیمپیچها به طور مداوم عوض شوند و موتور بتواند چرخش پیوسته و کامل داشته باشد. بدون کوموتاتور، موتور پس از رسیدن به یک زاویهٔ خاص متوقف میشد.
3) جاروبک یا براش (Brush)
براشها وظیفه انتقال انرژی الکتریکی از منبع تغذیه به کوموتاتور و در نهایت به سیمپیچهای رتور را دارند.
در موتورهای DC جاروبکی، براشها معمولاً نقطهٔ ضعف اصلی موتور محسوب میشوند؛ زیرا به دلیل تماس مستقیم و اصطکاک مداوم با کوموتاتور، بهمرورزمان دچار سایش شده و پس از مدتی کارایی خود را از دست میدهند.
4) آهنربا (Magnet/استاتور)
آهنرباها بخش ثابتی از موتور هستند و نقش ایجاد میدان مغناطیسی ثابت را ایفا میکنند. این میدان مغناطیسی با میدان ایجادشده توسط سیمپیچهای رتور برهمکنش کرده و باعث جذب و دفع لازم برای چرخش موتور میشود. در موتورهای DC، این آهنرباها میتوانند از نوع دائمی یا الکترومغناطیسی باشند.
Back-EMF چیست؟
پیشازاین در مقاله «راهاندازی موتور براشلس» به طور مختصر به مفهوم Back-EMF اشاره کردهایم .
اما بهطورکلی، هر زمان که صحبت از موتور، سیمپیچ و میدان مغناطیسی میشود، یک عامل چهارم نیز به طور اجتنابناپذیر وارد ماجرا میشود و آن چیزی نیست جز ولتاژ Back-EMF (ولتاژ القایی برگشتی).
تعریف Back-EMF
Back-EMF ولتاژی است که در اثر حرکت سیمپیچ درون میدان مغناطیسی ایجاد میشود.
مطابق قانون القای الکترومغناطیسی، این ولتاژ:
- در خلاف جهت ولتاژ اعمالشده به موتور است
- و مقدار آن مستقیماً بهسرعت چرخش موتور وابسته است
به بیان سادهتر، هرچه موتور سریعتر بچرخد، نرخ تغییر شار مغناطیسی بیشتر شده و در نتیجه دامنه ولتاژ Back-EMF افزایش پیدا میکند.
در اینجا ارتباط مهمی شکل میگیرد:
اگر ولتاژ Back-EMF متناسب با سرعت موتور است، پس با اندازهگیری این ولتاژ میتوان سرعت موتور را تخمین زد.
همین ویژگی باعث شده است که Back-EMF بهعنوان یک روش کمهزینه و بدون نیاز به سنسور اضافی برای تخمین سرعت موتور موردتوجه قرار بگیرد.
ایده کلی اندازهگیری سرعت با Back-EMF
برای استفاده از Back-EMF در اندازهگیری سرعت موتور، باید:
- در لحظاتی که موتور تغذیه نمیشود (یا PWM در حالت خاموش است)،
- ولتاژ القاشده روی سیمپیچ را اندازهگیری کنیم،
- و سپس با تحلیل دامنه یا فرکانس این ولتاژ، سرعت چرخش موتور را محاسبه کنیم.
یکم ایده رو باز کنیم:
بزارید یکم عمیقتر و روی شکل موج با هم صحبت کنیم.
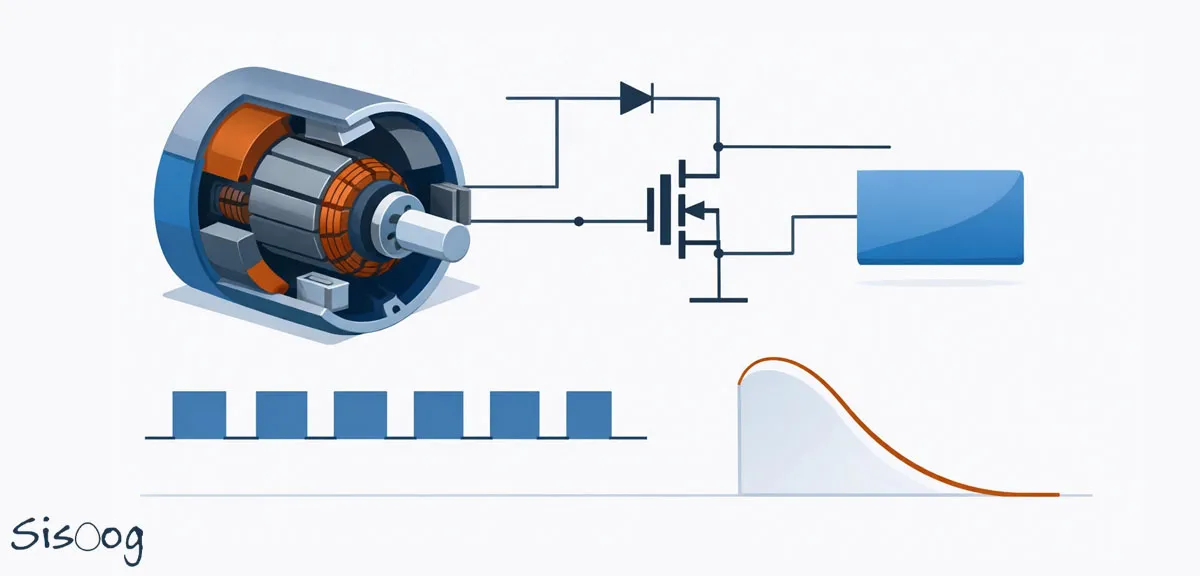
فرض کنید مدار زیر رو آماده کردیم:

ولتاژ +VC با مقدار 4 ولت تغذیه میشه و ترانزیستور با دیوتی سایکل 12.5% سوئیچ میکنه.
در شکل زیر میتونیم شکل موجی که از نقطه BEMF_TO_ADC دیده میشه رو مشاهده کنیم:

همونطور که مشخص هست با خاموششدن ماسفت یک ولتاژ زیادی از سمت موتور باتوجهبه سلفی بدون بار در مدار القا میشه که خوب توسط ِD2 حذف میشه (که همه خوب بلدن این چه کاری انجام میده)
ولی کار ما با بقیه قسمتهای زمان خاموش بودن ماسفت هست. همونطور که مشخص هست ما در ادامه زمان خاموشی (بعد از Spike) میتونیم ولتاژ Back-EMF را مشاهده کنیم.
حالا اگر کمی بار روی شفت موتور اعمال کنیم و به اصلاح سرعت موتور رو بهصورت مکانیکی کم کنیم همچین شکل موجی رو میتونیم مشاهده کنیم:

همونطور که در شکل موج مشخص هست با کاهش دور موتور، ولتاژ back-emf کم شده.
تحلیل ولتاژ Back‑EMF با میکروکنترلر:
در این روش، اندازهگیری سرعت چرخش موتور (RPM) با استفاده از مبدل آنالوگ به دیجیتال (ADC) میکروکنترلر ATmega168 انجام میشود. ایده اصلی روش برایناساس است که در بازههایی که خروجی PWM خاموش است، ولتاژ Back‑EMF تولیدشده توسط موتور اندازهگیری شود.
بااینحال، در طراحی این روش دو محدودیت مهم وجود دارد که حتماً باید در نظر گرفته شوند:
- حداکثر فرکانس PWM
- حداقل عرض پالس PWM
علت وجود این محدودیتها آن است که ADC میکروکنترلر برای انجام هر تبدیل به زمان مشخصی نیاز دارد. اگر زمان خاموش بودن PWM از این مقدار کمتر باشد، عملاً امکان نمونهبرداری صحیح توسط ADC وجود نخواهد داشت.
بررسی زمان تبدیل ADC در ATmega168:
بهعنوانمثال، در میکروکنترلر ATmega168، واحد ADC برای انجام هر تبدیل به ۱۳ سیکل کلاک ADC نیاز دارد.
(که معمولاً بهصورت ۱۲ سیکل کاری بهعلاوه سیکل راهاندازی در نظر گرفته میشود)
در این طراحی:
- فرکانس کاری میکروکنترلر: 8Mhz
- مقدار prescaler برای ADC: 64
در نتیجه:
- فرکانس کلاک ADC برابر است با:

- پریود کلاک ADC برابر است با: 8µs
که حداقل زمان لازم برای یک تبدیل ADC برابر است با: 140µs=13*8µs
علاوه بر زمان تبدیل ADC، لازم است یک زمان مرده کوتاه (در حد چند میکروثانیه) نیز در نظر گرفته شود تا نویزها و پیکهای ناشی از القای سیمپیچ موتور و ناپایداریهای لحظهای پس از خاموششدن PWM کاهشیافته و ولتاژ Back‑EMF به حالت پایدار برسد.
در نتیجه حداقل زمان برای PWM باید بیشتر از 120 میکرو ثانیه باشد . اگر این زمان کمتر از مقدار فوق باشد، ADC فرصت کافی برای خواندن و نمونهبرداری صحیح از سیگنال Back‑EMF را نخواهد داشت.
البته این محدودیت به این معنا نیست که در PWMهای بالا (مثلاً بالاتر از 90٪ یا حتی 100٪) امکان استفاده از این روش وجود ندارد.
در چنین شرایطی میتوان از یک راهکار ساده و عملی استفاده کرد:
- هر چند ثانیه یکبار
- PWM به مدت بسیار کوتاه (در حد چند میلیثانیه) خاموش میشود
- و در این بازه، اندازهگیری سرعت موتور انجام میگیرد
ممکن است این سؤال مطرح شود که آیا در این مدت کوتاه، گشتاور موتور کاهش پیدا نمیکند؟
پاسخ این است که باتوجهبه کوتاهبودن این بازه زمانی، تأثیر محسوسی روی گشتاور و عملکرد مکانیکی موتور نخواهد داشت.
تریگر کردن ADC با PWM تایمر ۱
برای تولید سیگنال PWM از Timer1 بهعنوان مولد PWM استفاده میکنیم. علاوه بر این، وقفه OCIE1A (Output Compare Interrupt) این تایمر فعال میشود تا بهعنوان نقطه تریگر برای شروع اندازهگیری ADC مورداستفاده قرار گیرد.
در این روش، بهمحض وقوع وقفه OCIE1A، تبدیل ADC بلافاصله آغاز میشود. البته برای سادهسازی پیادهسازی نرمافزاری، یک یا چند نمونه ابتدایی ADC نادیده گرفته میشوند.
دلیل حذف نمونههای اولیه
نادیدهگرفتن نمونههای اولیه دو مزیت مهم دارد:
-
پایدار شدن Back‑EMF
بلافاصله پس از خاموششدن PWM، ولتاژ دو سر سیمپیچ هنوز حاوی نویزها و پیکهای ناشی از اندوکتانس موتور است. با صرفنظرکردن از چند نمونه ابتدایی، فرصت کافی برای پایدار شدن ولتاژ Back‑EMF فراهم میشود.
-
سادگی نرمافزار
شروع فوری تبدیل ADC و حذف نمونههای اولیه، نیاز به پیادهسازی تایمرهای تأخیری یا منطق کنترلی پیچیده را از بین میبرد و ساختار کد را سادهتر و قابلاعتمادتر میکند.
در نهایت، نمونههایی که پس از این بازه گذرا ثبت میشوند، نمایانگر ولتاژ واقعی Back‑EMF بوده و میتوان از آنها برای تخمین سرعت چرخش موتور استفاده کرد.
|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 |
//------------------------ Init Timer 1 as PWM -------------------------------------------- void InitTimer1(void){ TCCR1A = (1<<COM1A1)|(1<<WGM11); // Toggle OC1A on compare 9Bit TCCR1B = (1<<WGM12); // 9bit TCCR1B = (1<<CS10)|(1<<CS11); // clk/64 8Mhz/64 = 125kHz 125kHz/9bit = 244Hz TIMSK1 |= (1<<OCIE1A); // on compare to trigger ADC OCR1A = 10; // initial pwm value } //---------------------------- Init ADC ------------------------------------ void InitADC(void){ ADCSRA |= (1<<ADEN) | (1<<ADPS2) | (1<<ADPS1); // enable ADC, prescaller 8000000 hz / 64 = 125kHz ADMUX |= (1<<REFS0); // reference AVCC DIDR0 = (1<<ADC0D); // disable digital input } |
برای افزایش دقت در تخمین سرعت موتور، معمولاً ولتاژ Back‑EMF در چند نمونه متوالی اندازهگیری و سپس میانگین گرفته میشود. این کار باعث کاهش نویزهای ناشی از PWM، جاروبکها و نویز کوانتیزاسیون ADC میشود، اما در عوض نرخ بهروزرسانی مقدار RPM کاهش مییابد. این کاهش نرخ نمونهبرداری در کاربردهایی مانند کنترل سرعت موتور با استفاده از کنترلکننده PID نهتنها مشکلساز نیست، بلکه مفید نیز هست، زیرا سیگنال سرعت نرمتر و پایدارتر بوده و از نوسانات ناخواسته در خروجی کنترل جلوگیری میکند. کنترل سرعت موتور در این ساختار میتواند به طور کامل با استفاده از PWM و یک H‑Bridge بهعنوان طبقه توان انجام شود.
کد پیوست شده مقادیر سرعت محاسبهشده از طریق رابط USART به یک دستگاه دیگر ارسال میشوند، هرچند در کاربردهای عملی میتوان این مقادیر را مستقیماً داخل خود میکروکنترلر ATmega168 و در حلقه کنترل استفاده کرد.
نکته مهم در این روش آن است که در صورت استفاده از منبع ولتاژ بالاتر برای تغذیه موتور، باید دقت شود که ولتاژ Back‑EMF از محدوده مجاز ورودی ADC فراتر نرود. در غیر این صورت، احتمال آسیبدیدن واحد ADC و در نهایت خود میکروکنترلر وجود دارد؛ بنابراین استفاده از مدارهای محدودکننده یا تقسیم ولتاژ برای محافظت از ورودی ADC ضروری است.



وبسایت: http://typhoonic.ir
.:: علاقهمند به حوزهی سختافزار و طراحی و توسعهی درایوهای موتورهای براشلس (BLDC) و موتورهای AC ::.

پالت | بازار خرید و فروش قطعات الکترونیک
قطعات اضافه و بدون استفاده همیشه یکی از سربارههای شرکتها و طراحان حوزه برق و الکترونیک بوده و هست. پالت سامانهای است که بصورت تخصصی اجازه خرید و فروش قطعات مازاد الکترونیک را فراهم میکند. فروش در پالت
آیسی | موتور جستجوی قطعات الکترونیک
سامانه آی سی سیسوگ (Isee) قابلیتی جدید و کاربردی از سیسوگ است. در این سامانه سعی شده است که جستجو، انتخاب و خرید مناسب تر قطعات برای کاربران تسهیل شود. جستجو در آیسی
سیسوگشاپ | فروشگاه محصولات Quectel
فروشگاه سیسوگ مجموعه ای متمرکز بر تکنولوژی های مبتنی بر IOT و ماژول های M2M نظیر GSM، GPS، LTE، NB-IOT، WiFi، BT و ... جایی که با تعامل فنی و سازنده، بهترین راهکارها انتخاب می شوند. برو به فروشگاه سیسوگ
سیسوگ فروم | محلی برای پاسخ پرسشهای شما
دغدغه همیشگی فعالان تخصصی هر حوزه وجود بستری برای گفتگو و پرسش و پاسخ است. سیسوگ فروم یک انجمن آنلاین است که بصورت تخصصی امکان بحث، گفتگو و پرسش و پاسخ در حوزه الکترونیک را فراهم میکند. پرسش در سیسوگ فرم
سیکار | اولین مرجع متن باز ECU در ایران
بررسی و ارائه اطلاعات مربوط به ECU (واحد کنترل الکترونیکی) و نرمافزارهای متن باز مرتبط با آن برو به سیکار







سیسوگ با افتخار فضایی برای اشتراک گذاری دانش شماست. برای ما مقاله بنویسید.