

اگر قصد یادگیری نحوه ساخت یک پهپاد کنترلی را دارید، جای درستی آمدهاید. افراد زیادی هستند که به دنیای جدید پهپاد علاقهمندند. اگر شما نیز یکی از این علاقهمندان هستید، این مطلب میتواند شما را در ساخت پهپاد دستساز راهنمایی کند.

در این راهنمای گامبهگام، موارد زیر را فرا خواهید گرفت:
همانطور که در مورد دوم اشاره شد، این راهنما بهجای لحیم کردن قطعات الکترونیکی از پیش مونتاژشده که در یک کیت پهپاد عرضه میشود، شما را به دانش پیدا کردن قطعات مجهز میکند. مانند همان ضربالمثل معروف که میگوید «اگر به شخصی ماهی بدهید برای یک روز او را سیر کردهاید اما اگر به او ماهیگیری یاد بدهید، یک عمر سیرش کردهاید».
ممکن است از قبل نوع خاصی از پهپاد را در نظر داشته باشید، مانند یک کوادکوپتر FPV کوچک یا یک اکتوکوپتر بزرگتر برای بلندکردن بار. نکته جالب این است که ساختار یک پهپاد برای هر نوع پهپادی که دوست دارید بسازید تقریباً یکسان است.
این راهنما با درنظرگرفتن این موضوع، عموماً هدفمند نوشته شده و میتوان از آن بهعنوان یک مرجع برای هر نوع پهپادی استفاده کرد.

دو نکته اصلی درمورد چارچوب پهپاد که باید به آن توجه کنید: اول اینکه پهپاد چند بازو دارد. معمولاً هر بازو دارای یک موتور و یک پروانه است. به همین دلیل، پهپادهایی که چند موتور دارند را «مولتی روتور» مینامند.

تریکوپتر: پهپاد سهموتوره
کوادکوپتر: پهپاد چهارموتوره
هگزاکوپتر: پهپاد ششموتوره
اکتوکوپتر: پهپاد هشتموتوره
کوادکوپترها با اختلاف محبوبترین پهپادها هستند، بنابراین در این مطلب روی نحوه ساخت کوادکوپتر تمرکز خواهیم کرد.
دومین چیزی که باید درمورد چارچوبها بدانید اندازه آنها است. اندازه چارچوبها با بیشترین فاصلهای که دو موتور از یکدیگر دارند مشخص میشود. در کوادکوپترها، این اندازه معمولاً برابر است با فاصله بین دو موتور مورب برحسب میلیمتر.

پهپاد نانو: ۸۰-۱۰۰ میلیمتر
میکرو پهپاد: ۱۰۰-۱۵۰ میلیمتر
پهپاد کوچک: ۱۵۰-۲۵۰ میلیمتر
پهپاد متوسط: ۲۵۰-۴۰۰ میلیمتر
پهپاد بزرگ: +۴۰۰ میلیمتر
اگر میخواهید ساخت پهپاد را از صفر شروع کنید، اولین گام انتخاب اندازه چارچوب است.
دو نوع موتور وجود دارد: با جاروبک و براشلس. در پهپادهای ارزانقیمتِ آماده پرواز از موتورهای با جاروبک استفاده میشود، زیرا این موتورها ارزانتر هستند. اما با وجود ارزانتر بودن، بسیار سریعتر از موتورهای براشلس فرسوده شده و خراب میشوند. موتورهای ببراشلس دوام بسیار بیشتری داشته و برای ساخت پهپادهای دستساز ارجحیت دارند.
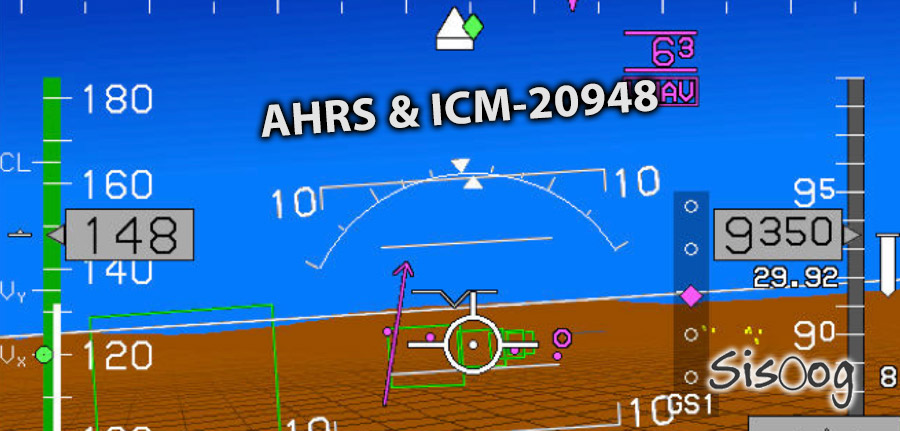
تعداد بیشماری موتور براشلس وجود دارد. برای اینکه بدانید متناسب با وسیلهای که میسازید چه موتوری بهترین عملکرد را دارد، اکثر سازندگان اطلاعاتی درمورد محصول به شما میدهند. دو مورد از رایجترین مشخصات، اندازه و مقدار KV موتور است.

برای مثال، اندازه موتور در این تصویر، ۲۲۱۳ است. این عدد درواقع نشاندهنده دو عدد است و بهتر است به این صورت نشان داده شود: ۲۲-۱۳.
عدد ۲۲ عرض استاتور و عدد ۱۳ ارتفاع روتور برحسب میلیمتر است. معمولاً، هرچه عرض بیشتر باشد، موتور گشتاور بیشتری دارد.
یکی دیگر از مشخصات موتورهای براشلس، مقدار KV است. این مقدار در موتور تصویر بالا 935KV است. KV را با کیلوولت اشتباه نگیرید. مقدار KV به معنای تعداد دور موتور در دقیقه بهازای هر ولت است.
بنابراین، اگر یک ولت به موتور 935KV اعمال کنیم، با سرعت ۹۳۵ دور در دقیقه میچرخد. همچنین بهازای دو ولت ۱۸۷۰ دور در دقیقه خواهد چرخید.
موتورهای با KV کمتر، گشتاور بسیار بیشتری تولید میکنند؛ بنابراین، میتوانند برای بالارفتن، پروانههای بزرگتر را با سرعت کمتر بچرخانند. موتورهای با KV بزرگتر گشتاور بسیار کمتری تولید میکنند، اما برای بالارفتن، پروانههای کوچکتر را بسیار سریعتر میچرخانند.
معمولاً پهپادهای بزرگتر از موتورهای با KV پایین و پهپادهای کوچکتر از موتورهای با KV بالا استفاده میکنند.
اکثر سازندگان، مشخصات قطعاتی که باید همراه با موتور استفاده شوند را در اختیار شما قرار میدهند. این مشخصات پس از انتخاب موتور میتواند در انتخاب قطعات مفید باشد.
موتور نمونه در تصویر بالا با اطلاعات مفیدی همراه است که در ذیل به آنها میپردازیم.
قطعه بعدی برای ساخت پهپاد، پروانه است. پروانهها همیشه با یک عدد چهاررقمی مانند ۸۰۴۵ یا ۱۰۴۵ یا ۶۰۳۰ همراهاند.
دو رقم اول، قطر پروانه را برحسب اینچ نشان میدهد. برایناساس، قطر پروانه ۸۰۴۵، ۸ اینچ خواهد بود.
دو رقم آخر نشاندهنده گام پروانه برحسب اینچ است. بهعنوانمثال، گام پروانه ۸۰۴۵، ۴/۵ اینچ و پروانه ۶۰۳۰، ۳ اینچ است.

درک شهودی گام پروانه اندکی کمتر از قطر پروانه است. ازنظر کیفی، هرچه گام پروانه بیشتر باشد، مقدار هوای بیشتری رانده میشود. چرخش یک پروانه با گام صفر اینچ، شبیه چرخیدن یک چاقوی کره است.
برای درک بهتر گام پروانه، حرکت پروانه در هوا را به حرکت پیچ در چوب تشبیه میکنیم. پیچها نیز دارای گام هستند. اگر یک پیچ را با یک چرخش درون تکه چوبی بچرخانید، در عمق ثابتی چوب را حفر میکند.
حال تصور کنید که گام پروانه ۸۰۴۵ روی یک پیچ نوشته شده باشد، یعنی گام پیچ ۴/۵ باشد. یک چرخش باعث میشود پیچ تا ۴/۵ اینچ در چوب فرو رود. اکنون میتوان متوجه شد که هر چه گام پروانه بیشتر باشد، ماده (هوا) بیشتری جابهجا خواهد شد.
پروانههایی که گام بیشتری دارند، معمولاً همراه موتورهای با KV پایین استفاده میشوند؛ زیرا گشتاور بیشتری تولید میکنند. آنها میتوانند آهستهتر بچرخند؛ زیرا پروانههای با گام بیشتر، هوای زیادی را در هر واحد چرخش میرانند. پروانههایی که گام کمتری دارند، به همراه موتورهای با KV بالا استفاده میشوند؛ زیرا چرخش آنها بسیار سریعتر است؛ بنابراین، آنها باید سریعتر بچرخند؛ زیرا در هر چرخش هوای کمتری را میرانند.
اگر از موتور براشلس استفاده میکنید، به کنترلکننده سرعت الکترونیکی نیاز دارید. موتورهای با جاروبک فقط به یک ولتاژ ورودی DC ساده احتیاج داشته و نیازی به ESC ندارند.

از طرف دیگر، موتور براشلس برای کار کردن نیاز به ورودی شبیه به سهفاز دارد. تنها کاری که باید انجام دهید تغذیه ESC با یک ولتاژ ورودی DC است. با این کار، بهطور خودکار سه ولتاژ ناهمفاز تولید میشود که با اتصال به موتور، سبب چرخش آن خواهد شد.
سازنده، محدوده ولتاژ ورودی که ESC میتواند به کار ببرد را در اختیار شما قرار میدهد، پس مراقب باشید.
معمولاً ESC ها با سه خروجی همراه هستند و باید تعدادی کانکتور بولت نری را به سرهایی لحیم کنید که به کانکتورهای بولت ماده موتورها متصل میشوند.
باتری تأمینکننده انرژی پهپاد شما است. ازاینرو، انتخاب باتری مناسب برای ساخت پهپاد بسیار مهم است.
باتری لیپو به دلیل ظرفیت و جریان خروجی بالا، تقریباً همیشه باتری انتخابی برای پهپادها است.
یک باتری لیپو معمولی با مشخصاتی همچون 3000 mAh 4S 50C همراه است.

یک بسته باتری مجموعهای از باتریهای کوچک جداگانه به نام سلول است. ولتاژ یک سلول لیپو هنگام شارژ کامل، ۴/۲ ولت و در صورت تخلیه ۳/۷ ولت است؛ بنابراین بخش 4S در مشخصات به این معنی است که چهار سلول از سلولهای لیپو بهصورت سری قرار گرفتهاند. ازآنجا که ولتاژ باتریهای متصل شده بهصورت سری با هم جمع میشوند، ولتاژ شارژ کامل کل بسته باتری برابر است با
۱۶/۸ ولت = (۴/۲ ولت)( ۴ سلول) = (ولتاژ شارژ کامل)(تعداد سلول)
mAh مقدار ظرفیت را نشان میدهد. ظرفیت معمولاً برحسب کولن اندازهگیری میشود و نشاندهنده میزان شارژ باتری است.

شاید این سؤال برایتان مطرح شود که چرا در mAh واحد کولن دیده نمیشود. پاسخ این است که این واحد در آن نهفته است. برای درک بهتر، آن را در ذیل شرح میدهیم.
1 Amp = 1 C/S
1 h = 3600 S
m = milli = 1/1000
با جایگذاری متغیرها در mAh داریم:
3000 mAh = 3000(1/1000)(1 C/S)(3600 S) = 10800 C
بنابراین، 3000 mAh برابر است با 10800 C.
هرچه نرخ C بالاتر باشد، خروجی جریان آن باتری نیز میتواند بیشتر باشد.
برای یافتن حداکثر جریان خروجی که باتری میتواند به کار ببرد، نرخ C را در ظرفیت باتری برحسب Ah ضرب کنید.
واحد نرخ C، 1/h است.
3 Ah × 50(1/h) = 150 A
بنابراین، این باتری فرضی 50C میتواند 150A جریان خروجی داشته باشد.
در حال حاضر، درمورد معنای واقعی نرخ C اندکی سردرگمی وجود دارد. برخی از سازندگان نرخ C را حداکثر جریان ناگهانی که میتوان در حضور آن در مدت ۳۰ ثانیه خروجی داشت معنا میکنند و برخی دیگر نیز از نرخ C برای نشاندادن حداکثر جریان خروجی مداوم استفاده میکنند. با سازنده باتری خود مشورت کنید تا مشخص شود از کدام نرخ C استفاده میکنند!
قطعات الکتریکی اصلی را در صفحه توزیع برق وصل میکنند. ESCها و کانکتور باتری، قطعات اصلیای هستند که به PDB لحیم میکنید.

هنگامی که باتری را به PDB وصل میکنید، به هر چیزی که به PDB متصل است، انرژی داده میشود؛ بنابراین، PDB همان جایی است که ESCها جریان خود را از آن دریافت میکنند.
کنترلکننده پرواز که اساساً مغز پهپاد بهحساب میآید، یک هاب سختافزاری است که تمام قطعات پهپاد ازجمله ESCها، GPS، تلهمتری، ورودی RC و بسیاری قطعات دیگر به آن وصل میشوند.
همه کنترلکنندههای پرواز باید مجهز به ژیروسکوپ و شتابسنج (IMU) باشند. هر دوی آنها با هم به تعادل خودکار پهپاد بدون ورودی دستی کمک میکنند.
تمام کنترلکنندههای پرواز توسط Firmware کنترل میشوند. بسته به کنترلکننده پرواز، ممکن است به Firmware جدید فلش روی برد دسترسی داشته باشید. Firmware میتواند کلوزسورس (عموم نمیتوانند آن را ببینند)، یا اپنسورس(عموم میتوانند کد را ببینند و تغییراتی در آن ایجاد کنند) باشد.

اگر میخواهید یک پهپاد با Firmware اپن سورس مانند PX4 یا ArduPilot بسازید، مطمئن شوید بردی که میخرید پشتیبانی میشود.
ماژولهای GPS را میتوان با قیمت بسیار ارزان خریداری کرد. آنها معمولاً از پروتکل UART یا I2C استفاده میکنند. اکثر ماژولهای GPSی که برای استفاده در پهپاد طراحی شدهاند، مجهز به یک مغناطیسسنج نیز هستند.
شما باید ماژول GPS/ مغناطیسسنج خود را در هوا بالا ببرید تا از میدانهای مغناطیسی تولیدشده توسط سیستم الکترونیکی پهپاد دور شود.
اگر GPS شما به سیستم الکترونیکی خیلی نزدیک باشد، میتواند باعث خوانش نادرست و یک پرواز خندهدار شود.
اگر میخواهید پهپادی با ماژول GPS خوب بسازید، به دنبال ماژولی باشید که تراشه M8N u-blox داشته باشد. این نوع ماژولها بسیار بهتر از برخی دیگر از ماژولهای GPS موجود در آمازون هستند و قیمت تقریباً مشابهی دارند.

کنترلکننده RC شامل یک فرستنده (چیزی که تحت کنترل خلبان است) و یک گیرنده (برای دریافت دستورات خلبان) است.
گیرنده به کنترلکننده پرواز وصل میشود.
همراه کنترلکننده RC تعدادی گزینه وجود دارد. کنترلکنندههای RC ارزانتر تعداد کانال کمتری دارند. بااینحال، برای یک پهپاد حداقل تعداد کانالهایی که باید استفاده کنید، احتمالاً پنج یا شش کانال است.

هر پهپادی دارای چهار کانال Roll، Pitch، Yaw و Throttle است که هر کدام از آنها برای کنترل نوع خاصی از حرکت پهپاد به کار میروند.
کانالهای اضافی را میتوان برای کنترل منحصربهفردتر مانند تغییر حالت پرواز مولتی روتور استفاده کرد.
از تلهمتری برای برقراری ارتباط بیسیم با پهپاد استفاده میشود.
یک ماژول به پهپاد و یک ماژول دیگر به کامپیوتر (که گاهی اوقات ایستگاه کنترل زمینی GCS نامیده میشود) متصل میشود.
GCS میتواند از راه دور با پهپاد ارتباط برقرار کرده و اطلاعات را ارسال و دریافت کند.
ردیابی موقعیت پهپاد روی نقشه، تعیین سرعت حرکت پهپاد، دیدن سطوح ولتاژ باتری و غیره کارهایی است که GCS میتواند انجام دهد.
همچنین میتوان از آن برای فرماندادن به پهپاد استفاده کرد، یعنی درواقع برای به پرواز درآوردن پهپاد نیازی به کنترلکننده RC ندارید. اما بااینوجود، از تلهمتری بیشتر برای دریافت دادهها از پهپاد استفاده میشود.

قبل از اینکه بخواهید قطعات را کنار هم قرار دهید و یک پهپاد بسازید، باید بدانید که چگونه قطعات مناسب را پیدا کنید. فرایند انتخاب قطعات مناسب پهپاد، آمیزهای از هنر و علم است.
معیار اولیهای که برای انتخاب قطعات مورد بررسی قرار میدهیم، نسبت رانش به وزن است که در ادامه آن را با نام نسبت TW به کار میبریم.
همه ما میدانیم وزن نیرویی است که ما را به سمت زمین میکشد.
پهپادها نیز وزن دارند و تنها در صورتی میتوانند پرواز کنند که بتوانند رانش رو به بالایی که بیشتر از وزنشان است ایجاد کنند.
بهعنوانمثال، اگر نسبت TW ۲ باشد، یعنی پهپاد میتواند دوبرابر وزن خود نیروی روبهبالا ایجاد کند.
شما باید بسته به کاربرد پهپاد، نسبتهای TW متفاوتی را در نظر بگیرید. به همین دلیل، داشتن نسبت TW هدف، نخستین گام در فرایند طراحی پهپاد است؛ زیرا در این صورت، قطعاتی متناسب با هدف موردنظر انتخاب خواهید کرد.
برای به پرواز درآوردن یک پهپاد مهاجم FPV، معمولاً از نسبتهای TW ۴ و بیشتر استفاده میشود.
برای پهپادهایی که برای حمل بار طراحی شدهاند، نسبت TW تقریباً ۲ نرمال است. البته میتوان با نسبت TW ۱/۵ آن را به پرواز درآورد.
اگر نسبت TW پهپاد شما ۱ باشد، از شما خیلی دور نخواهد شد.
برای تخمین نسبت TW باید با تخمین وزن پهپاد شروع کنید.
برای این کار، وزن لیست قطعات بالا (مانند موتورها، ESCها، کنترلکننده پرواز و غیره) را با هم جمع کنید. باید ابتدا از چارچوب موردنظرتان آغاز کرده و قطعات را متناسب با آن انتخاب کنید.
فرض کنید تخمین وزن شما برای پهپادی که میخواهید بسازید ۱,۰۰۰ گرم است. اگر نسبت TW هدف شما ۲ باشد، به رانش ۲۰۰۰ گرمی نیاز دارید. برای یک کوادکوپتر، این مقدار به معنای رانش ۵۰۰ گرمی در هر موتور است.

تخمین رانش موتور، تابع ولتاژ باتری، اندازه پروانه و انتخاب موتور است. اگر یکی از این متغیرها را تغییر دهید، مقدار رانش تغییر خواهد کرد.
جدولهای رانش دارای دادههای تجربی هستند که به شما نشان میدهند چند گرم رانش برای متغیرهای مختلف دارید.
نمونهای از یک جدول رانش برای موتورهای 2213kV eMax را در زیر مشاهده میکنید.

برای سادگی، فرض کنید حداکثر رانش این موتور، بیشترین مقدار رانش نشاندادهشده در این جدول است. اگر از پروانه ۱۰۴۵/ باتری ۱۱ ولت استفاده میکنید، حداکثر رانش ۶۷۰ گرم و اگر از پروانه ۸۰۴۵/ باتری ۱۱ ولت استفاده میکنید، حداکثر رانش ۴۹۰ گرم خواهد بود.
بنابراین، اگر از پروانههای ۸۰۴۵ و باتری ۱۱ ولت استفاده کنید، ۱۹۶۰ گرم رانش (۴۹۰ گرم ×۴ موتور) و اگر از پروانههای ۱۰۴۵ و باتری ۱۱ ولت استفاده کنید، ۲۶۸۰ گرم رانش (۶۷۰ گرم ×۴ موتور) ایجاد خواهد شد.
۱۹۶۰ گرم رانش و ۱۰۰۰ گرم وزن، تا حد زیادی ما را به هدفمان یعنی نسبت TW ۲ نزدیک میکند.






منبع: Drone Dojo

پالت | بازار خرید و فروش قطعات الکترونیک
قطعات اضافه و بدون استفاده همیشه یکی از سربارههای شرکتها و طراحان حوزه برق و الکترونیک بوده و هست. پالت سامانهای است که بصورت تخصصی اجازه خرید و فروش قطعات مازاد الکترونیک را فراهم میکند. فروش در پالت
آیسی | موتور جستجوی قطعات الکترونیک
سامانه آی سی سیسوگ (Isee) قابلیتی جدید و کاربردی از سیسوگ است. در این سامانه سعی شده است که جستجو، انتخاب و خرید مناسب تر قطعات برای کاربران تسهیل شود. جستجو در آیسی
سیسوگشاپ | فروشگاه محصولات Quectel
فروشگاه سیسوگ مجموعه ای متمرکز بر تکنولوژی های مبتنی بر IOT و ماژول های M2M نظیر GSM، GPS، LTE، NB-IOT، WiFi، BT و ... جایی که با تعامل فنی و سازنده، بهترین راهکارها انتخاب می شوند. برو به فروشگاه سیسوگ
سیسوگ فروم | محلی برای پاسخ پرسشهای شما
دغدغه همیشگی فعالان تخصصی هر حوزه وجود بستری برای گفتگو و پرسش و پاسخ است. سیسوگ فروم یک انجمن آنلاین است که بصورت تخصصی امکان بحث، گفتگو و پرسش و پاسخ در حوزه الکترونیک را فراهم میکند. پرسش در سیسوگ فرم
سیکار | اولین مرجع متن باز ECU در ایران
بررسی و ارائه اطلاعات مربوط به ECU (واحد کنترل الکترونیکی) و نرمافزارهای متن باز مرتبط با آن برو به سیکارمن تجهیزات نیاز دارم از کجا تهیه کنم خداوند خیر برکت بدهد دوستان عزیزم چیکار کنم کسی میتواند همکاری کند من یک دانه دورست کردم از کجا وسایل شات بدست بیارم لطفاً رهنما همکاری کنید
ما یک پهباد درست کردیم که تقریبا یک کیلو وزن را با خود انتقال میداد
درود
خدا خیرتان دهد که اینگونه مطالب ناب و به روز دنیا را در اختیار جوانان میگذارید
بسیار سپاسگذارم
سلام من برای ساخت یک کواد کوپتر نیاز به وسایل لازم دارم. آیا این تجهیزات تحت عنوان یک پک در سایت شما موجود هست؟
سلام دوست عزیز میتونید برای تهیه این تجهیزات به وبسایت isee.sisoog.com مراجعه کنید.













سیسوگ با افتخار فضایی برای اشتراک گذاری دانش شماست. برای ما مقاله بنویسید.